【案例介绍】DMV-VGR在交换机贴标定位中应用 点击:928 | 回复:0

发表于:2022-02-20 13:36:43
楼主
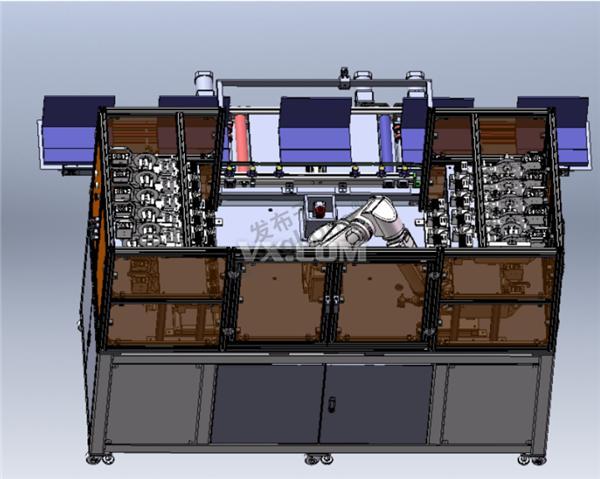
今天主要介绍DMV-VGR在交换机贴标定定位中的应用,交换机到位后,机器人带着相机,移动拍交换机的位置,另外,标签从脱标机出来后,机器人吸取标签,然后移动到下视觉进行拍照补正,之后就贴到交换机上,完成贴标。
1、设备图片:
2、视觉需求
六轴机械手吸取标签后,需要视觉定位标签位置进行补正。视觉需要定位交换机的位置,并反馈给机械手,完成贴标。一台手臂最多同时贴5种标签。

标签 交换机
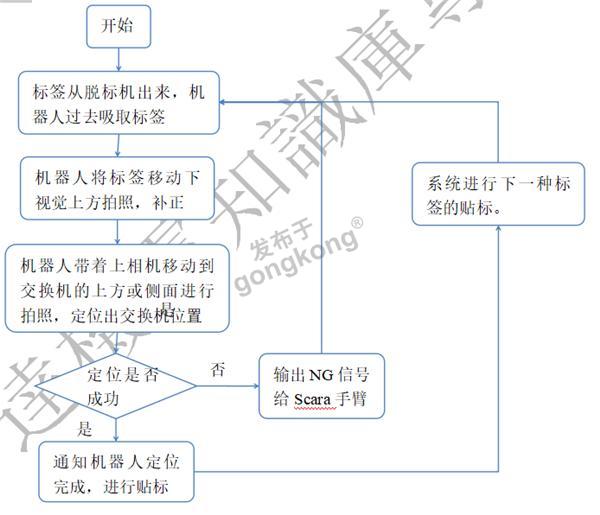
3、工艺流程
4、处理效果说明
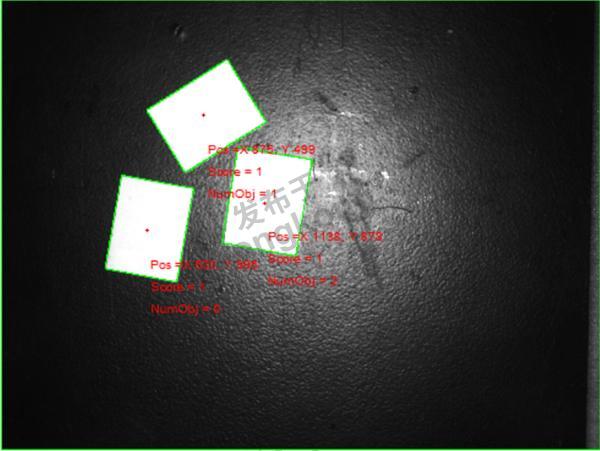
标签(不透明)处理效果:不透明标签的反光较强,用整体轮廓定位
标签(透明)处理效果:透明标签在中间区域才会反光,因此采用部分的轮廓进行定位

![]()
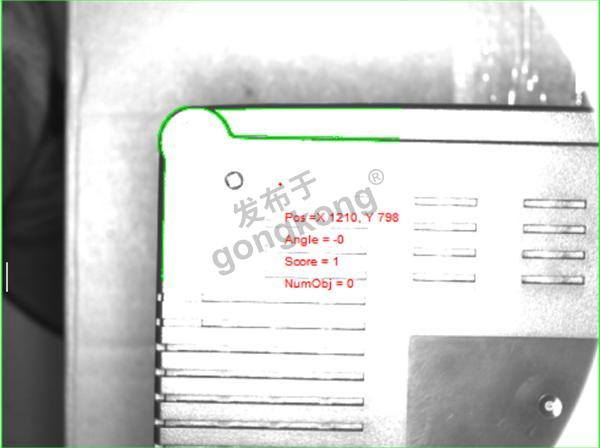
交换机处理效果:通过较强的曝光,将交换机打亮,突显出交换机轮廓后,再进行定位
5、难点和注意事项:
Ø 标签的背景需要黑色不反光,因此吸盘需要发黑处理;
Ø 由于拍交换机的相机是装在机器人上的,光源不能太大,因此拍照的视野较小,只拍交换机的一角,并以此做定位;
Ø 目前使用环形光对交换机底部的进行打光,测量效果是可行的,但侧面的有圆弧边的情况,不一定适用,若后续有类似的产品的,只可能需要针定特定产品重新打光测试。
6、方案特点:
Ø 该方案柔性强,兼容多种标签的贴标,而且交换机顶和侧面都可以贴标签;
Ø 最多可以支持12组不同的标签进行贴签;
Ø 可以极大的缩短开发周期,节约开发成本;
Ø 方案可靠,容易维护和扩展





楼主最近还看过
热门招聘
相关主题
- 谁有左位移指令程序呀
 [347]
[347] - 10mc运动模块modbus通讯[277]
- 拉丝排线机方案[123]
- 台达显示器黑屏高进赐教[251]
- 新人 台达伺服求助[175]
- 台达文本一体机TP04P在DCS系...[385]
- modbus的报文怎么看,真心看不...[1415]
- 台达DVP 24 ECOOR PLC[105]
- 台达机器视觉系统DMV系列检测...[59]
- 台达温控器接线[1479]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
