雅马哈四轴机器人调试笔记 点击:2920 | 回复:12

雅马哈四轴机器人调试笔记
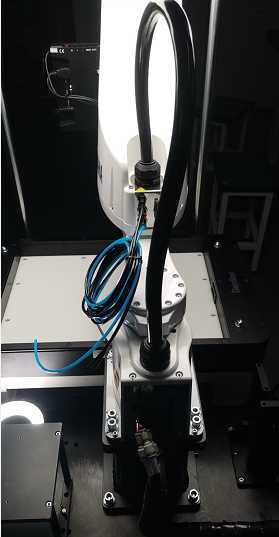
1.0 先简单说下硬件,如下图对着插就行,雅马哈四轴主要硬件有控制器跟机械手,机械手到控制器主要有4跟电机接口电缆,每2个轴有一个编码器接口电缆,每根轴有一个配置的数据备份电池。
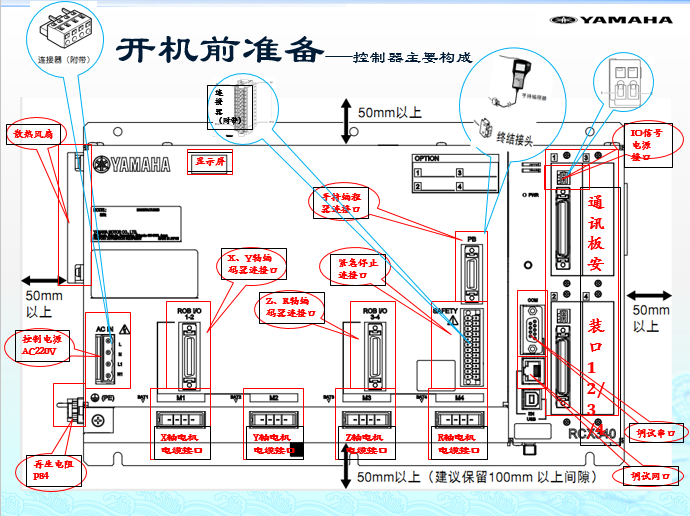
1.1 再说控制器,电源有3个,在左下角有2个220V的输入,上面LN是用来驱动电机的,下面L1N1是控制电源,右上角有一个24V上正下负,用来驱动IO接口的电磁阀什么的
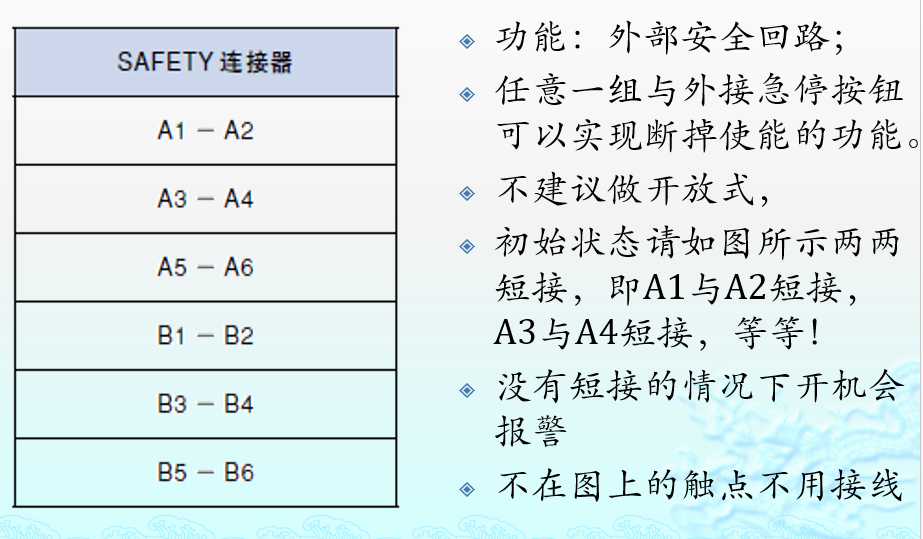
1.2 控制器还有急停接口,共6组急停,只要断掉任意一组就可以实现断掉使能的功能
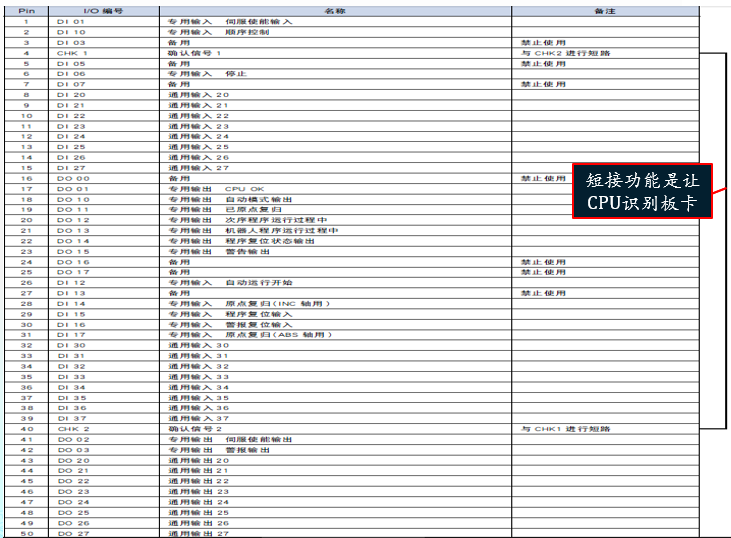
1.3 另外再说下IO,IO的NPN和PNP规格是买的时候就定好的,有标签在控制器上,我们只要接入外部24V就行,然后根据下图的点位配置就可以了,专用输入都是定死的,只有通用输入可以用,注意下第一序列代表的是针脚,第二序列代表的是控制器点位,DI21代表的是DI2(1),就是输入字节2的第一位,DO22代表的是DO2(2),就是输出字节2的第二位

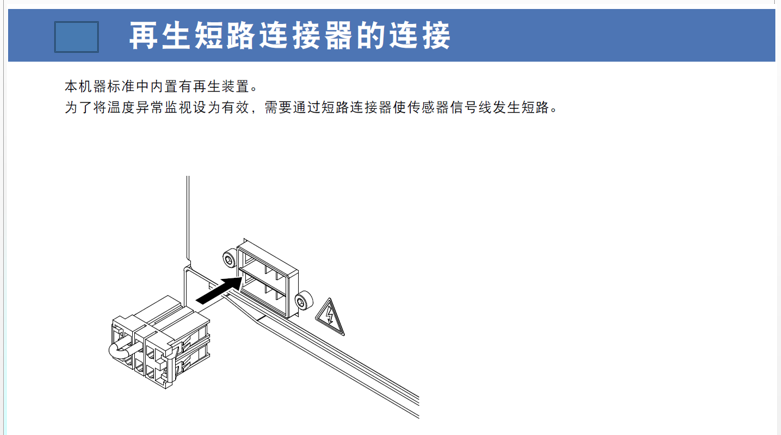
1.4 温度异常监视再生短路连接器,需要把他插上,还有如果没有用手持式示教器的话,要把那个口短接掉,有配套短接
2. 雅马哈软件操作
2.1 原点复归 首次调试或者锂电池没电或者编码器拔出后,需要做一次原点复归,而原点复归之前要手动把,XY轴放到正中,如下图,执行后只要不往两边跑就是可以的,4个轴绿灯持续会亮就行
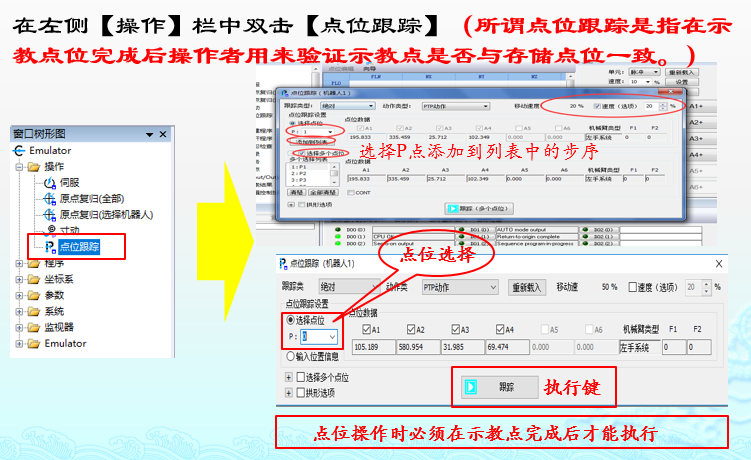
2.2 手动点位跟踪,可以多点跟踪执行,也可以单点,多点的话要加入列表
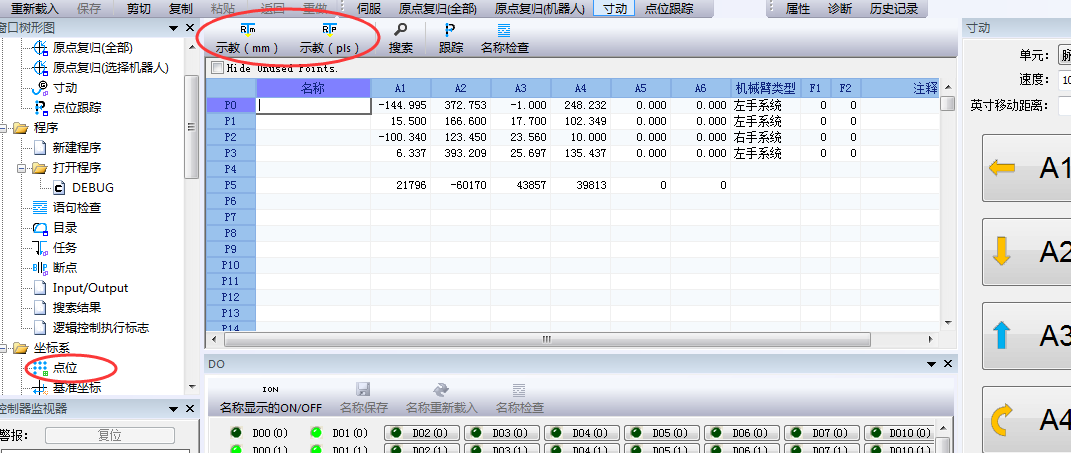
2.3 选择点位,点击示教后,把当前机械手的坐标存储到当前选择的坐标点上,存储方式有脉冲跟距离两种,如果是TCP写入到点位数据的,在左上角点击重新载入,可以刷新目前坐标点的数据
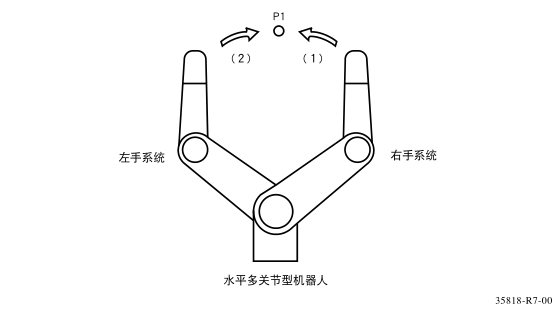
注解:再说下左右手系统,就是如果当轴在左手的某个点,如果要去右手的某个死角点可能到不了,不过一般性不会用到死角位置,可以不用管
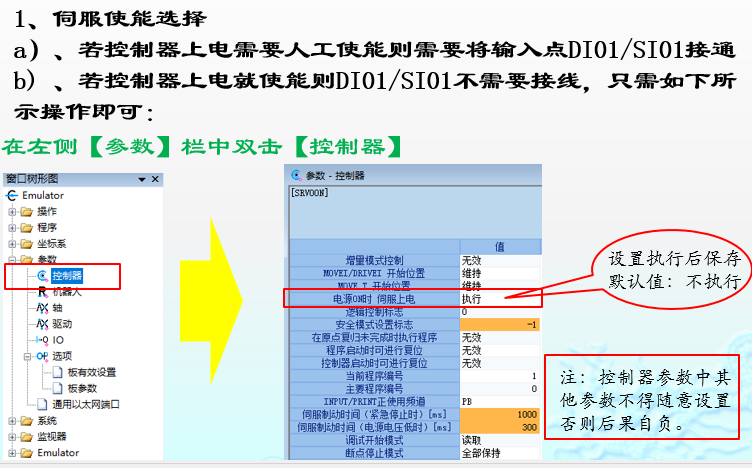
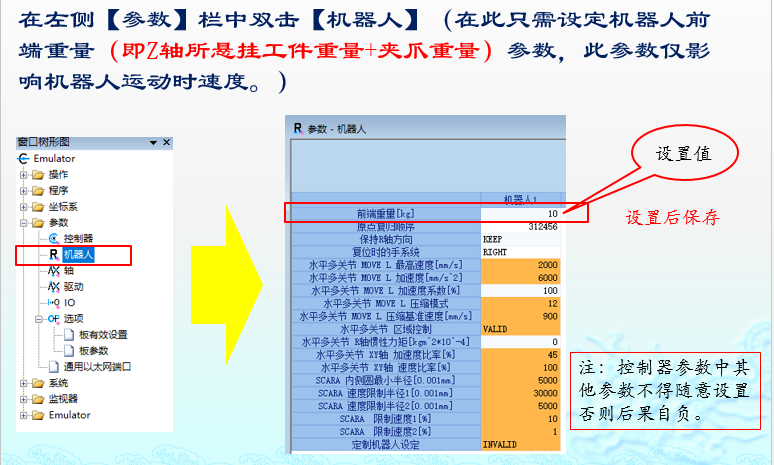
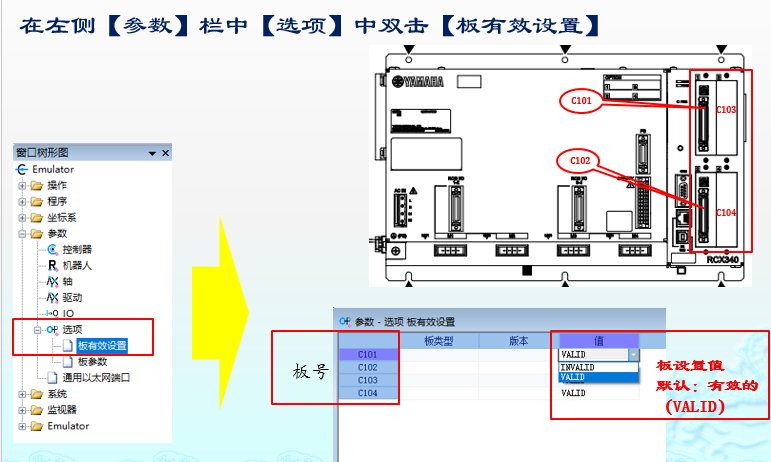
2.4 控制器的参数设置
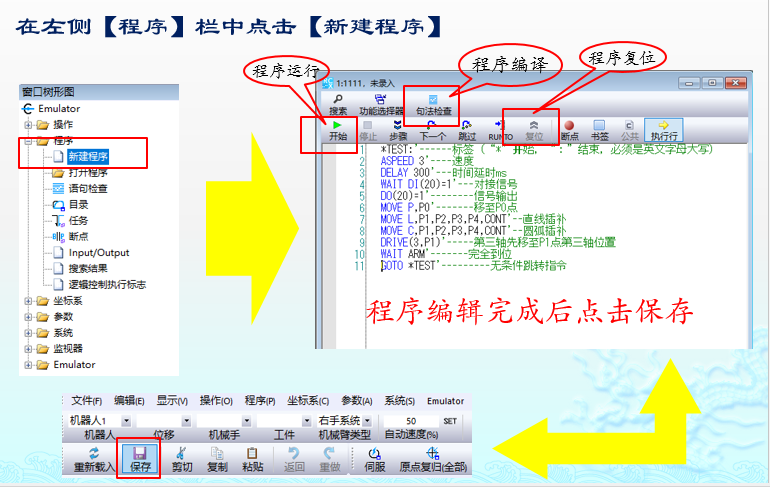
2.5 程序编写,常用的语句在下图中
了解最新工控PLC,上位机,机器人,通讯等实例测试笔记~~请关注百家号或头条号--老王工控笔记





楼主最近还看过





- 用vb6.0和opc开发工具包开发...
 [6355]
[6355] - ABB资料[6766]
- 新书推荐:《施耐德电气SoMach...[3669]
- 提供包米勒Baumuller相关资料...[5234]
- 如何用西门子wincc实现电机转...[3393]
- 求横河UT350操作说明书!!急急...[6743]
- 面向意大利B5B6 细纱机感兴趣...[4061]
- protool中文资料[5992]
- RSView Studio组态手册 经典...[4888]
- 赠送横河EJA选型样本[4383]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
