西门子S7-1500如何控制雅马哈四轴机器人? 点击:6246 | 回复:8

目录
1 实现的功能,及应用的场合
1.1 学习机器人的前提条件
学习该内容前须掌握以下的几个知识点:
西门子S7-1500 PLC的基本知识包括西门子系列PLC使用Profinet组态通讯的方式,西门子PLC中基本的数据类型组成(位,字节,字和双字),西门子PLC与第三方设备通讯后IO点映射的基本概念以及使用西门子PLC简单编写程序的能力。
1.2 机器人的简单介绍
雅马哈四轴机器人的四个轴分别是X轴,Y轴,Z轴以及R轴。具体的轴的位置见图1-1。所有的四轴机器人基本上是有这四个轴组成的,所以我们对其有个基本的了解就行,学习机器人主要是学习机器人的控制器。下图是雅马哈四轴机器人的示例图。可用于工业现场工件的抓取放置。

2控制器面板介绍
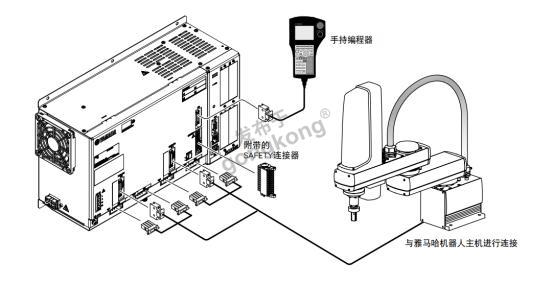
雅马哈四轴机器人的控制为RCX340,具体的控制器上各个接口的作用如下图所示:

RCX340控制器是雅马哈机器人用来控制四轴机器人的控制器,它的外观可见图2-1。上面的插头口分别是轴1控制接头,轴2控制接头,轴三控制接头,轴四控制接头。选件板(主要用于和第三方通讯,此次项目中使用到的是PROFINET通讯)。Enthernet接口:用于控制器与PC通讯。PB接口:用于连接示教器。若没有选购示教器则接口处的插头也不能拔掉,因为插头中有厂家以及短接好的安全信号线。电源端子:共两组220V交流电源,一组是控制器电源,一组是伺服马达电源。四组电池组:用于控制器的断电数据保持,若将其拔掉则会报电池错误。四组电池组分别对应四个伺服轴。
3软硬件介绍
3.1 RCX340控制器接线操作
3.2 电路图

电路图中L,N和PE是控制器的外部220V电源,该电源用于给控制器供电。图中的A1-A6和B1-B6是控制器面板上的Safety信号,若不接外部控制信号则应将A1A2,A3A4,A5A6,B1B2,B3B4,B5B6相应的短接起来。若需要接入安全信号或者急停则应按照上图所示的接法接入外部安全信号。至于右边的PBX接线则表示机器人示教器与控制器的接线,若选购了示教器则出厂时厂家会为你接好线,若没选购厂家也会为你将插头接口,所以这部分的接线图仅供参考学习。
3.3 软件介绍
CX340控制器使用的编辑软件是RCX-Studio。注意该控制器的另一个软件为RCX-Studio Pro,该软件是RCX-Studio到升级版。该软件需要秘钥,如无秘钥使用RCX-Studio就行。
下面我们来重点介绍该软件的使用方法。打开该软件,点击新建连接弹出如图2.2-1所示的界面,可使用网线连接。注意该控制器默认IP地址是192.168.0.2,端口号为23。

使用控制器RCX340可分为两种情况来控制,具体可分为通过PLC控制器以及不通过PLC来控制。若不通过PLC来控制则需手动在软件中将控制器的马达上电。而使用PLC来控制RCX340则需要在PLC程序中写上电程序和输入紧急停止程序。
具体的手动步骤可见附件说明书的《RCX-StudioPro_C_V.1.16》中的第四节P14页联机操作。该章节介绍了使用该软件联机时的操作,包括与控制器的连接,伺服上电,原点回归,寸动移动,点位跟踪以及监控功能。将这一小节读完可完全掌握该软件常用的一些操作。
4.实现功能步骤
4.1 与PLC的组态通讯连接
此次项目所采用的的通讯方式为与西门子S7-1500PLC的Profinet通讯,首先需要去官网下载RCX340控制器的GSD文件,网址为:
https://www.yamahamotor.com.cn/robot/download/fieldbus/
下载好后打开博图进行GSD文件的安装。然后在设备组态中搜索RCX340,将其拖入组套网络中。控制器与PLC之间的IO点是经过映射来交换信息的,可以从下图中看图两个插槽中总共分配了48个字节,分别是第一个插槽16个字,第二个插槽16个字节。
若对于西门子软件与第三方设备组态通讯不够了解的可查看附件说明书中的《PROFINET_RCX340_C_V.1.03》,该说明书介绍了机器人和PLC通讯的一些简单步骤。
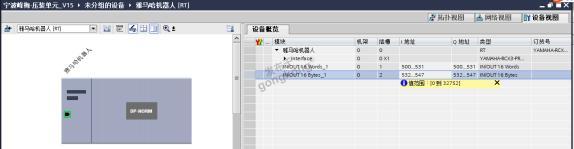
硬件组态图
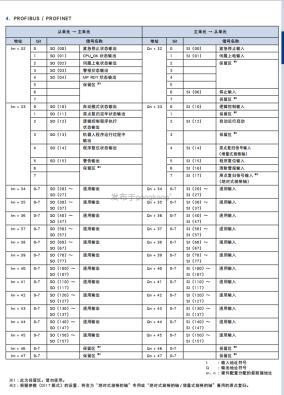
上图是一部分映射点的对应。比如Qn表示的是PLC硬件组态中的起始地址,通过上图可知PLC组态的起始的起始地址是500则上图中的Qn+32表示的是QB532字节,也就是第二个插槽的字节。其中表格中写有功能的IO点是控制器已经定义好的具有特殊功能的端口,保留区的端口是不可用的端口,而通用输入通用输出则是用于让我们自己来定义的接口。具体的说明可查看附件中的《Remote IO_RCX340》这一说明书中的P1-5页。
4.2 PLC编程介绍
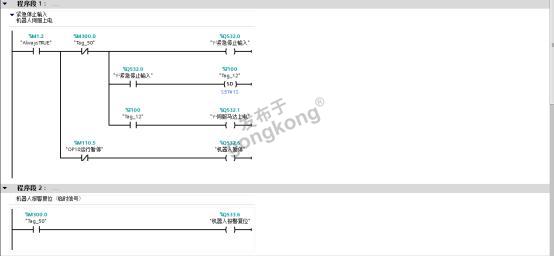
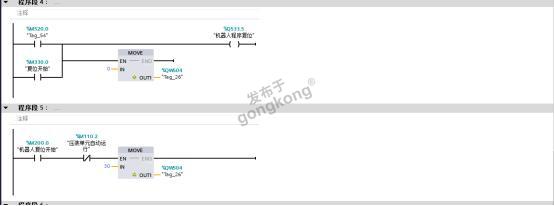
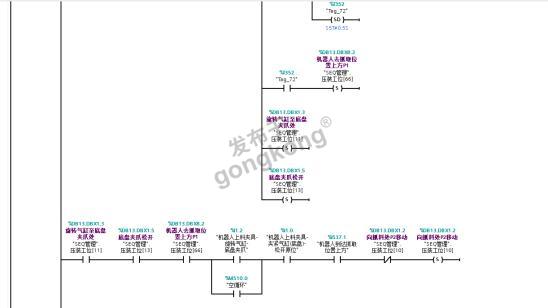
下面我就截取一部分程序来做一个PLC与机器人对接信号的介绍。从下图中可以看出这两段程序分别起到的作用是用来解除控制器的紧急停止,给伺服马达上电,关闭机器人的暂停功能以及对机器人的报警进行复位。程序中的输出点Q映射控制器的SIW(),这些点就是我上面所说的特殊功能点。这些点的功能已经被控制器系统给定义好了,我们只需查阅手册然后使用PLC来导通对应的Q点即可。
图中Q532.0表示的是来自PLC的紧急停止信号,当使用PLC控制机器人时请务必使该电导通,当该点导通时延时1s来使得伺服马达上电。Q532.6表示机器人的暂停信号,当该电不通时机器人暂停。第二段的Q533.6表示机器人报警复位,当机器人报警时可通过导通该点来时机器人的报警复位掉。
4.3机器人编程介绍
介绍完了PLC程序后我们来介绍一下机器人编程,在看机器人程序时需要将两者结合起来看。我们结合下图以及PLC程序来看一下这段程序的意思。
首先我们先定义一个*ATEST的标签,该标签部分为主程序,然后使用CASE语句来选择不同值的情况下跳转到不同标签下的程序。这里的SIW(2)是由PLC的QW504映射过来的,我们给QW504赋值多少程序就会进入哪条子程序。具体的每条程序的含义可见示例程序后面的注释。
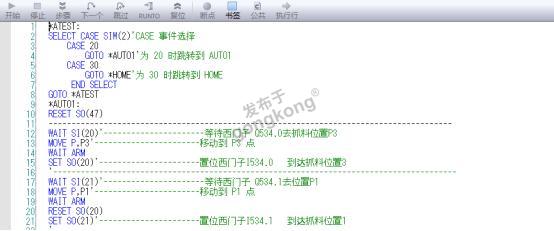
刚才讲的是如何通过赋值然后将值传送给机器人从而使用CASE语句来选择子程序。现在我们来讲一下如何通过PLC来看控制器机器人运动。首先我们需要PLC输出一个点来给控制器,通过这个点来告诉控制器需要移送机器人。比如图中的DB13.DBX8.2,用这个点来接通机器人的SI2(0),当WAIT SI2(0)满足即SI2(0)=1时执行下一步MOE P,P3(使用点对点的移动到P3位置),然后等待轴完全停止后置位一个点SO2(0),然后该点通过映射给I537.1表示机器人已到达所需要移动到的位置。这就是一个PLC控制机器人,然后机器人回馈信号给PLC已到达位置的信号交互。可参考这个程序然后根据实际工艺对象来编写程序。
5.项目通用性总结
总结一下使用机器人首先需要了解该机器人所使用的控制型号,根据型号查询该类控制器的接线方式。接线完成通电成功后首先需使用PC连接机器人控制器,若所使用的机器人配备了示教器则可使用示教器动作。不论使用的是PC还是示教器在第一次上电后都需要进行一个原位回归。使用PC可对机器人进行伺服上电,报警查询,寸动等操作。进行完成后需对机器人与PLC进行通讯连接以及信号对接,然后就是在机器人软件中进行编程试验并与PLC接收发送的信号进行互动。
关于此技术文章,如需要其相关资料,或者技术方面问题需要咨询,请咨询-工控无忧。









- 同是1KW电机,单相和三相哪个...
 [10414]
[10414] - 220v电源指示灯虚亮原因和解...[50476]
- 关于NO,NC[12905]
- 一个时间继电器两个接触器控...[15116]
- 相同的加热器,接星形接法与接...[21876]
- 通电时,接触器常开触点先闭合...[16658]
- 高压电工考试资料[15674]
- 三相电流的不平衡度的计算方...[13487]
- 为什么老烧电机[13441]
- 双速电机,从低速到高速切换时...[21987]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
