燃烧自动控制 点击:454 | 回复:7









发表于:2017-11-06 20:33:32
7楼
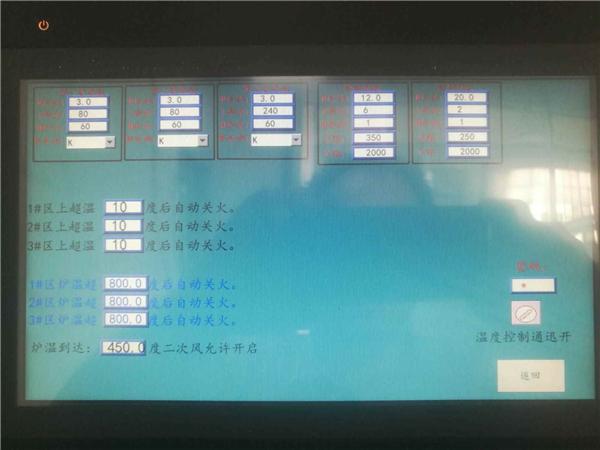
在 P(比例)、I(积分)、D(微分)这三种控制作用中,比例部分与误差
信号在时间上是一致的,只要误差一出现,比例部分就能及时地产生与误差成正
比的调节作用,具有调节及时的特点。比例系数 K p 越大,比例调节作用越强,
系统的稳态精度越高;但是对于大多数系统,K p 过大会使系统的输出量振荡加
剧,稳定性降低。
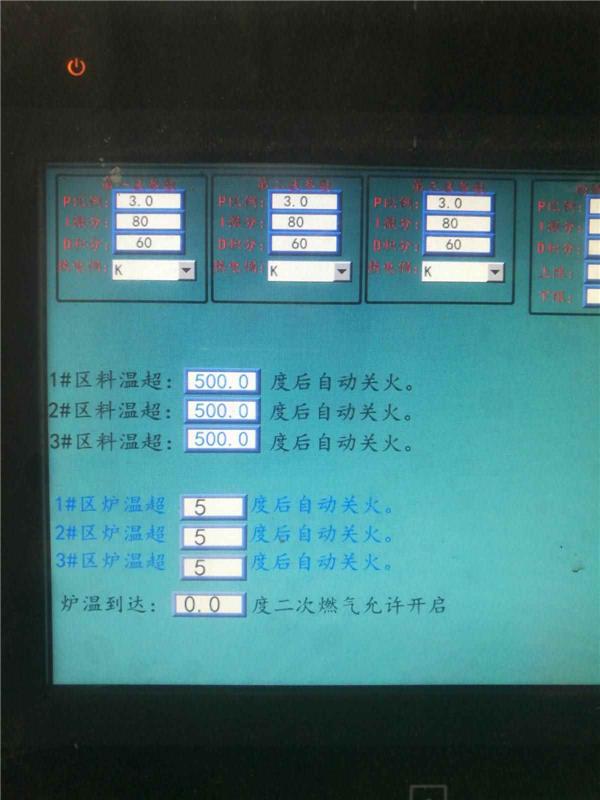
积分作用与当前误差的大小和误差的历史情况都有关系,只要误差不为零,
控制器的输出就会因积分作用而不断变化,一直要到误差消失,系统处于稳定状
态时,积分部分才不再变化。因此,积分部分可以消除稳态误差,提高控制精度,
但是积分作用的动作缓慢,可能给系统的动态稳定性带来不良影响。积分时间常
数 T I 增大时,积分作用减弱,系统的动态性能(稳定性)可能有所改善,但是
消除稳态误差的速度减慢。
微分部分是根据误差变化的速度,提前给出较大的调节作用。微分部分反映
了系统变化的趋势,它较比例调节更为及时,所以微分部分具有超前和预测的特
点。微分时间常数 T D 增大时,超调量减小,动态性能得到改善,但是抑制高频
干扰的能力下降。
热门招聘
相关主题
- 欧姆龙plc编程软件运行不了
 [1223]
[1223] - 如何实现PLC数据在EXCEL上实...[6086]
- 丹佛斯变频器的启动端子是哪...[1668]
- 发那科黑屏请高手来看看[5203]
- MCGS与宇电仪表怎样设置通讯...[1914]
- ABB变频器复位问题(急求赐教...[1142]
- 590直流调速器弱磁到80%左右...[1571]
- kuka机器人短路制动 停机[3156]
- 一个光电开关[1792]
- 基恩士plc报警代码[5203]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
