常用光电传感器知识介绍 点击:241 | 回复:11

1、光电传感器的定义
光电传感器(电眼)是利用光的各种性质,检测物体的有无和表面状态的变化等的传感器。
光电传感器主要由发光的投光部和接受光线的受光部构成。如果投射的光线因检测物体不同而被遮掩或反射,到达受光部的量将会发生变化。受光部将检测出这种变化,并转换为电气信号,进行输出。
大多使用可视光(主要为红色,也用绿色、蓝色来判断颜色)和红外光。
2、光电传感器的特点如下
①检测距离长 达到10m以上的检测距离。
②对检测物体的限制少由于以检测物体引起的遮光和反射为检测原理,所以不象接近传感器等将检测物体限定金属,它可对玻璃.塑料.木材.液体等几乎所有物体进行检测。
③响应时间短 光本身为高速,并且传感器的电路都由电子零件构成,所以不包含机械性工作时间,响应时间非常短。
④分辨率高 能通过高级设计技术使投光光束集中在小光点,或通过构成特殊的受光光学系统,来实现高分辨率。也可进行微小物体的检测和高精度的位置检测。
⑤可实现非接触的检测 可以无须机械性地接触检测物体实现检测,因此不会对检测物体和传感器造成损伤。因此,传感器能长期使用。
⑥可实现颜色判别通过检测物体形成的光的反射率和吸收率根据被投光的光线波长和检测物体的颜色组合而有所差异。利用这种性质,可对检测物体的颜色进行检测。
⑦便于调整在投射可视光的类型中,投光光束是眼睛可见的,便于对检测物体的位置进行调整。







3、光电传感器的常见分类
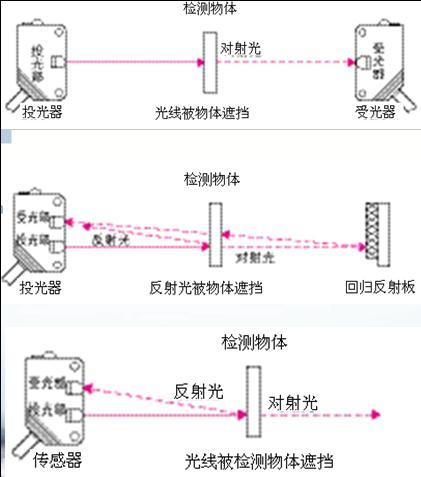
1)、对射型
为使投光器发出的光能进入受光器,对向设置投光器与受光器。如果检测物体进入投光器和受光器之间遮蔽了光线,进入受光器的光量将减少。掌握这种减少后可进行检测。
2)、回归反射型
在投受光器一体型中,通常光线不会返回受光部。如果投光部发出的光线碰到检测物体,检测物体反射的光线将进入受光部,受光量将增加。掌握这种增加后可进行检测。
3)、扩散反射型
在投受光器一体型中,通常投光部发出的光线将反射到相对设置的反射板上,回到受光部。如果检测物体遮蔽光线,进入受光部的光量将减少。掌握这种减少后可进行检测。
4)、 其它种类

4、常见光电传感器原理
1)、光的性质
A、 直射:光在空气中和水中时,总是直线传播。使用对射型传感器外置的开叉来检测微小物体便是运用了这种原理。

B、 折射:是指光射入到曲折率不同的界面上时,通过该界面后,改变行进方向的现象。

C、反射:(正反射、回归反射、扩散反射)在镜面和玻璃平面上,光会以与入射角相同的
角度反射,称为正反射。3个平面互相直角般组合的形状称为三面直角棱镜。如果面向三面直角棱镜投光,将反复进行正反射,最终的反射光将向投光的反方向行进。这样的反射称为回归反射。多数的回归反射板都是由数mm角的三面直角棱镜按规律排列而构成的。此外,在白纸等没有光泽性的表面上,光线将向各个方向反射,这样的反射称为扩散反射。扩散反射型将该原理作为检测方式。

D、偏光:光线可以表现为与其行进方向垂直的振动波。作为光电传感器的光源,主要使用LED。从LED投射的光线,会在与行进方向垂直的各个方向上振动,这种状态的光称为无偏光。将无偏光的光的振动方向限制在一个方向上的光学过滤器称为偏光过滤器。即从LED投光,并通过偏光过滤器的光线只在一个方向上振动,这种状态称为偏光(正确地说应为直线偏光)。在某一方向(例如纵方向)上振动的偏光,无法通过限制在其垂直方向(横方向)上振动的偏光过滤器。回归反射型的M.S.R功能和作为对射型配件的防止相互干扰过滤器就是应用了这种原理。








5、光电传感器的构成分类
光电传感器通常由投光部、受光部、增幅部、控制部、电源部构成,按其构成状态可分为以下几类:
1) 放大器分离型:仅投光部和受光部分离,分别作为投光部和受光部(对射型)、或一体的投受光器(反射型)。其他的增幅部、控制部采用一体的放大器单元形。 特长:投受光器仅由投光元件、受光元件及光学系统构成,所以可以采用小型,即使在狭小的场所设置投、受光器,也可在较远的场所调整灵敏度。投受光部与放大器单元间的信号线很容易受干扰。
2 ) 放大器内置型:除电源部以外为一体。(对射型分为包括投光部的投光器和包括受光部、增幅部、控制部的受光器两种)。电源部单独采用电源单元等形状。特长:由于受光部、增幅部、控制部为一体,所以不需要围绕微小信号的信号线,不易受干扰的影响。与放大器分离型相比,布线工时更少,一般比放大器分离型大。
3) 电源内置型:连电源部也包含在投光器、受光器中的一体化产品。特长:可直接连接到商用电源上,此外还能从受光器直接进行容量较大的控制输出。投光器、受光器中还包括了电源变压器等,所以与其他形态相比很大。
4) 光纤型:是在投光部、受光部上连接光纤的产品。由光纤单元和放大器单元构成。特长:根据光纤探头(前端部分)的组合不同,可构成对射型或反射型。适合于检测微小物体。光纤单元不受干扰的影响。
6、影响光电传感器检测的因素
1) 对于对射型/回归反射型:
A 检测物体:大小、形状(纵×横×高),透明度(不透明体|半透明体|透明体),移动速度V(m/s或个/分)。
B 传感器:检测距离(L),形状&大小的限制、传感器、回归反射板(回归反射型的情况下),有无多个紧密安装、台数、安装间距、是否可以交错安装,安装的限制(是否需要角度等)。
C 环境:环境温度,有无水、油、药品等飞散。
2) 对于扩散反射型、距离设定型、限定反射型 :
A 检测物体:大小、形状(纵×横×高),颜色,材料(铁、SUS、木、纸等),表面状态(粗糙、有光泽),移动速度V(m/s或个/分)。
B 传感器:检测距离(与工件之间的距离)(L),形状、大小的限制,有无多个紧密安装、台数、安装间距,安装的限制(是否需要角度等)。
C 背景:颜色,材料(铁、SUS、木、纸等),表面状态(粗糙、有光泽等)。
D 环境:环境温度,有无水、油、药品等飞散。
- 新一代企业级实时历史数据库...
 [1824]
[1824] - 霍尔传感器的应用与选择[312]
- 波仕 RS-232/RS-485/RS-422/...[249]
- 关于科尼起重机用的VACON变频...[911]
- 三相电流电压表如何安装?[233]
- 工厂人员定位解决方案[218]
- 人体压力分布测量系统(BPMS)...[1387]
- 滑环的工作原理[258]
- 力控实时历史数据库产品推介...[224]
- 合同扫描管理大师——为合同管...[249]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
