CANOPEN总线驱动器:Profinet转CanOpen网关的完美搭档 点击:87 | 回复:0

在进行上位机与CANopen总线步进电机之间的通信时通常会采用无锡耐特森Profinet转CanOpen网关。这种设计使得上位机能够直接通过Profinet转CanOpen网关使得PLC端的Profinet协议与CANopen总线步进电机进行交互,实时地获取设备的运行状态信息。

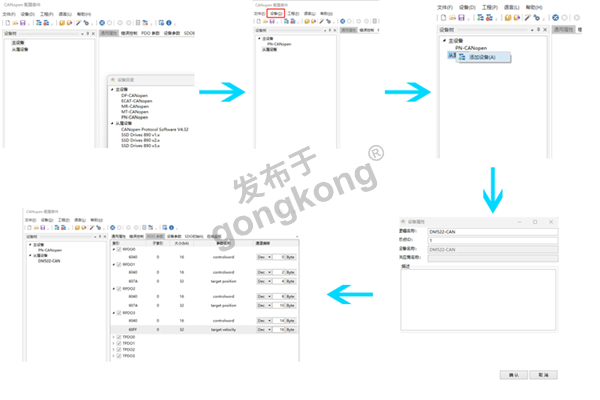
首先需要在主站设备中新建一个工程并添加主站设备,我们需要导入CANOPEN总线步进电机的EDS文件到主站设备中,右键添加从属设备。我们需要为每个从属设备设置站地址,以确保每个设备都能正确识别和响应来自主站的指令。
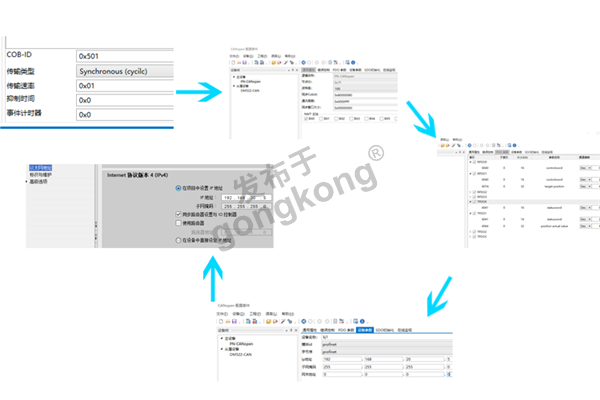
我们还需在Profinet转CanOpen网关软件中设置通道偏移,这个偏移值是用于指定每个子索引对应在PLC内的相对位置。为了确保数据不丢失,我们需要将TPDO(发送过程数据对象)和RPDO(接收过程数据对象)的传输方式设置为周期同步。我们需要设置同步周期,这个周期的值应根据实际需要进行调整。
通过上述步骤,我们就可以实现上位机与Profinet转CanOpen网关以及从属设备之间的顺畅通信,从而实时地获取和控制设备的运行状态。在进行博途配置之前,请确保已经安装了Profinet转CanOpen网关的GSD文件。接下来需要确认配置索引顺序和偏移,第二个站通道的偏移顺序需要累加。
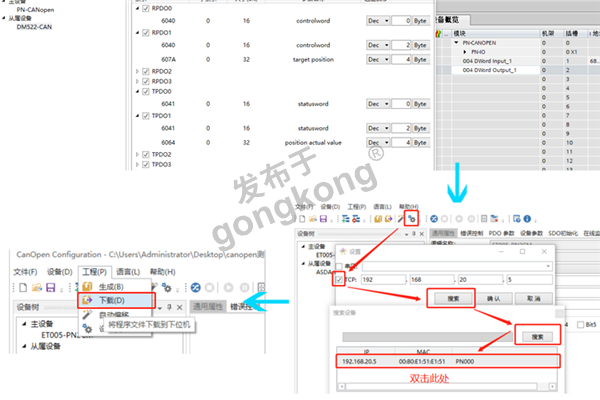
最后我们需要设置Profinet转CanOpen网关设备名称和IP地址,注意这里的设置必须与博途的设置保持一致,每个从站对应8字节输入和8字节输出,完成上述配置后,点击工程,点击生成,然后设置通讯串口,选择正确的TCP口,进行下载。完成后,双击带有IP地址和MAC地址显示条,系统会返回提示,此时点击确认即可。在博图组态监控表中,根据配置软件上的TPDO和RPDO进行指令发送及接收。通过这样的操作可以实现稳定、高效、可靠的数据交换,从而推动着工业自动化的发展。





楼主最近还看过

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
