ABB机器人编程指令Accset和Velset有什么区别 点击:11153 | 回复:6






楼主最近还看过


发表于:2020-08-28 11:10:55
5楼
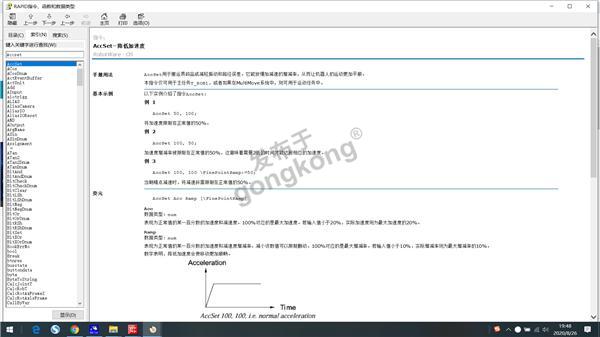
AccSet指令是用于限制加减速度和加减速度的增减率,举个例子:AccSet 50, 100 - 第一个参数50表示把加速度限制在正常值的50%,第二个参数表示加减速的增减率,作用同上。这个指令是使机器人运动更加平顺,减少突然加速或减速,一般用于搬运易碎品或液体等场合。
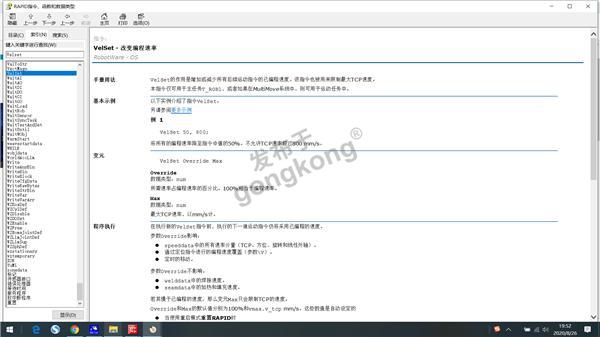
VelSet指令是用于限制速度和最大速度的,在程序中对后面的指令起作用,第一个参数表示限制速度的百分比,第二个参数表示限制的最大速度,这个指令一般是用于初步调试机器人轨迹的时候,把速度降低观察轨迹,以免发生安全事故;或者当机器人运动到某一段轨迹时需要降速运行;又或者在北方地区冬天机器人刚启动时从低速开始逐步加速运行预热。。等等根据具体情况应用。
用楼主的例子说明:
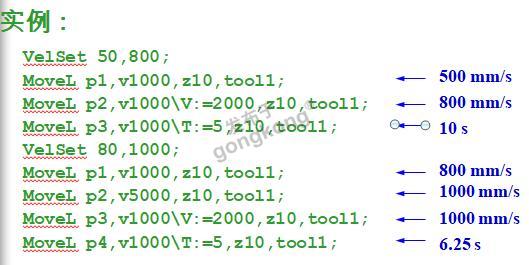
前3条moveL指令受第一条VelSet 50,800作用,限制速度为设定速度50%,最大速度800mm/s:
① v1000的50%是500,所以速度为500mm/s
② v1000\v:=2000,\v:=2000 定义了该指令TCP速率为2000mm/s(V1000参数内包含了TCP速度、工具重定位和外部轴速度),2000mm/s*50%=1000mm/s,超过了最大限速800mm/s,所以实际速度取800mm/s
③ v1000\T:=5 ,\T:=5 定义了该指令的运动总时间为5s,取代了设定的速度值,同时前面运动速度限制了50%,所以实际运动总时间为10s
后面4条moveL指令受第二条VelSet 80,1000作用,限制速度为设定速度80%,最大速度1000mm/s:
原理同上,我就不一一重复了。
不知道这么讲有没有解释清楚

热门招聘
相关主题
- 请教变频器显示电流问题
 [652]
[652] - 吐血整理|2017天猫双十一最全...[216]
- ABB ACS880GSD[3280]
- OPCA-02如何制作[419]
- 看污水处理厂变电所“数”写未...[227]
- ABB软启动无指示故障[293]
- acs510报F0026[1031]
- ACS880固件手册和在起升机上...[81]
- Microflex固件下载失败无法连...[122]
- 从备份生成系统时无法点击下...[89]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
