
有如下棋盘格
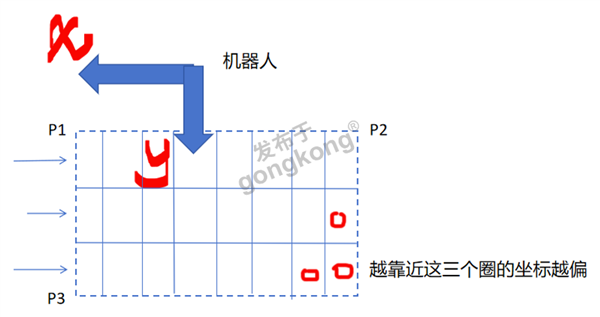
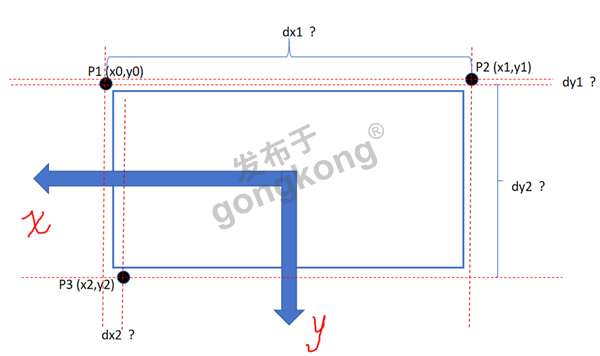
如果使用理想的行列差去计算偏移就会出现上图中三个红圈,定位不准。但是用以下的偏移方法就基本能和实际坐标点位重合。

我反正是没想明白。
实际上这个也不太准,P1对角线上的点的yaw角算的不对,越远差的越多。
哪位大佬有明白其奥义的,或者有更好的定位方法的,私信我。必有重谢。
 正在下载,请等待……
正在下载,请等待……


下载附件需 1 积分!

