回复
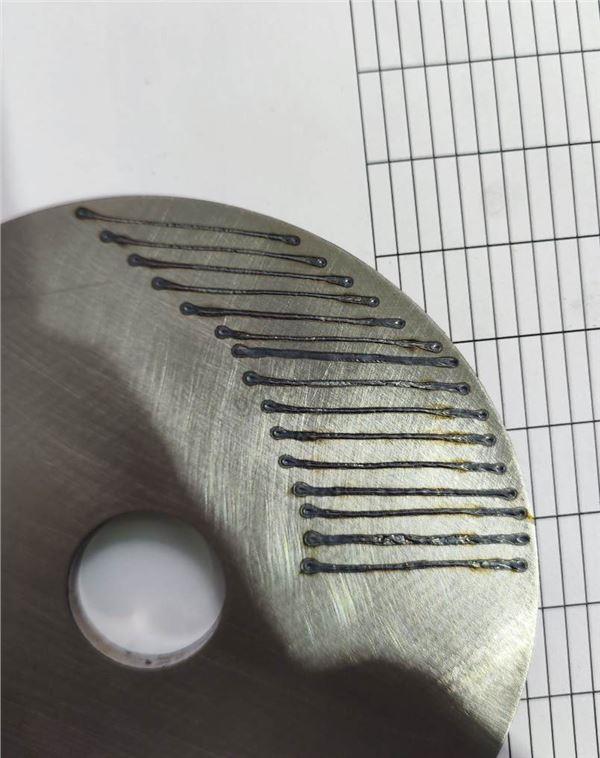
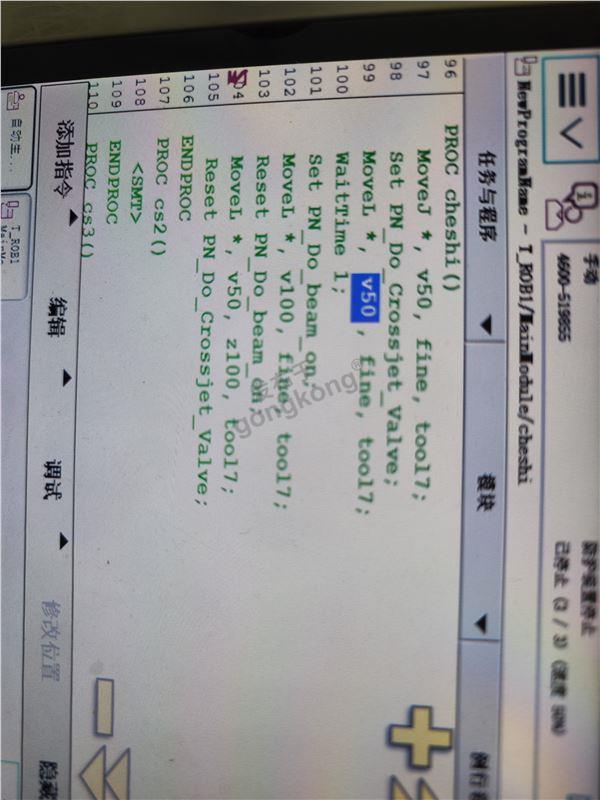
使用ABB机器人配合激光焊接,机器人运行速度在200mm/s-900mm/s,焊接长度约40-50mm,最终焊接出来是歪的,请各位大神帮忙找一下原因,附程序图和焊接图。
两个MoveL对应的robtarget点走直线是指在这两处,TCP点之间的连线为直线,如果两个TCP点不在板上(TCP定义问题),那么结果就是弯的