
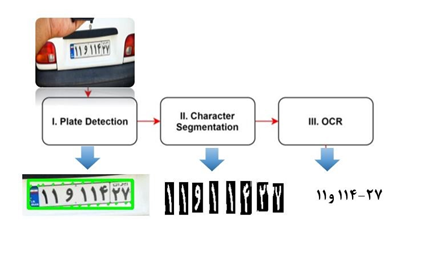
LabVIEW和Vision Assistant车牌识别系统,通过图像获取、预处理、定位、字符分割与识别及显示等流程,实现蓝底小型汽车号牌的快速准确定位与识别。经数百张图像验证,系统稳定可靠,可满足车辆管理场景的高效识别需求。
应用场景
适用于停车场出入口、高速公路收费站、园区门禁等车辆管理场景,通过自动识别车牌实现车辆身份核验、通行权限判断及信息记录,替代人工登记,提升通行效率与管理精准度。
硬件选型
选型依据
图像采集设备:选用稳定性强的设备,确保在不同光线(如白天强光、夜间弱光)下均能采集清晰的车牌图像,为后续处理提供高质量原始数据。
处理器:采用计算能力适配的设备,支持 LabVIEW 对图像数据的高速处理 ——LabVIEW 需调用视觉函数、运行形态学运算及 OCR 识别,对处理器的实时计算能力有一定要求。
存储设备:选用大容量设备,满足大量车牌图像的长期存储需求。LabVIEW 可直接调用存储接口,实现图像的快速读写与回溯查询。
软件架构
核心功能实现
图像获取:通过 LabVIEW 的 IMAQ Create、IMAQ GetFileInfo 及 IMAQ ReadFile 函数,输入图像存储路径即可读取图像,无需复杂代码编写,直接调用函数完成数据加载。
图像预处理与定位:
先通过 Vision Assistant 的颜色阈值函数(基于 HSL、HSI、RGB 三种颜色模型)将彩色图像转为二值图像,突出蓝底车牌的字符区域;
再用高级形态学函数(如凸包、填充孔洞、删除小目标)去除干扰,提取车牌轮廓;
最后通过 LabVIEW 的 IMAQ Rotate 等函数校正车牌倾斜(基于 Adv. Straight Edge 和卡尺函数测量的倾斜角度),完成精准定位。
字符分割与识别:利用 Vision Assistant 的 OCR 函数,先通过 “字符大小分割” 模式(设置边界矩形尺寸、字符间距等参数)分离字符,再通过 “训练所有字符”“训练错误字符” 等模式完成字符特征学习,最终实现字符识别。
结果显示:通过 LabVIEW 的图形化界面功能,实时显示原始图像、处理后图像及识别结果,直观呈现识别过程与结果。
架构优点
开发效率高:LabVIEW 为图形化编程,无需复杂语法编写,工程师通过拖拽函数模块即可搭建流程;Vision Assistant 可快速验证算法合理性,缩短调试周期。
函数复用性强:视觉与运动模块包含 400 多个现成函数(如 IMAQ 系列图像函数、形态学函数),直接调用即可实现核心功能,无需重复开发。
衔接流畅:Vision Assistant 编写的程序可直接转为 LabVIEW 的 VI 程序,避免跨平台适配问题,降低集成难度。
可扩展性好:若需新增功能(如识别新能源车牌),只需在现有架构中添加对应颜色模型阈值函数及 OCR 训练模块,无需重构整体框架。
架构特点
对比维度 | 本架构 | 其他架构 |
开发门槛 | 图形化编程,无需深厚编程基础,工程师聚焦算法逻辑 | 需掌握 C++ 等编程语言,代码编写与调试耗时 |
算法验证 | Vision Assistant 支持实时验证,快速迭代算法 | 需手动编写验证代码,验证周期长 |
函数调用 | 内置 400 + 视觉函数,直接调用 | 需手动封装基础函数,开发成本高 |
硬件适配 | 与主流图像采集、存储设备兼容性好,LabVIEW 可直接调用硬件接口 | 需单独开发硬件驱动,适配难度大 |
问题及解决
问题 1:不同车牌图像像素、大小差异大,定位效率低
解决:通过 LabVIEW 确定兴趣区域(ROI),仅对 ROI 分析而非全图处理,减少计算量;结合颜色阈值函数(多模型)突出车牌区域,提升定位针对性。问题 2:二值化后仍有干扰噪点,影响车牌提取
解决:采用高级形态学函数组合(如删除小目标、填充孔洞),去除背景噪点;通过粒子过滤函数(基于面积、质心等参数)保留车牌特征粒子,过滤无效干扰。问题 3:车牌倾斜导致字符分割错位
解决:用 Adv. Straight Edge 和卡尺函数测量倾斜角度,通过 LabVIEW 的 IMAQ Rotate 函数校正;校正后字符排列整齐,提升分割准确性。问题 4:OCR 识别准确率低(字符粘连、特征不明显)
解决:优化分割参数(如调整最小字符间距、边界矩形尺寸),避免字符粘连;采用 “训练错误字符” 模式,针对性强化未识别字符的特征学习,提升识别精度。

