
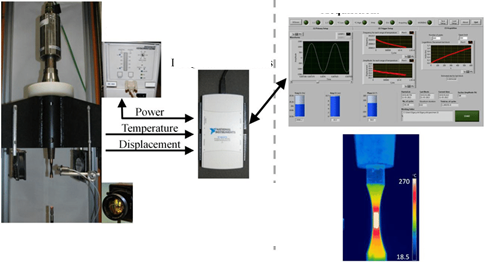
采用LabVIEW软件集成松下、NI 等硬件,构建了一套采用模糊 PID 控制算法的疲劳试验机控制系统。通过交流伺服电缸提供动力,结合高精度传感器与运动控制卡,实现对材料疲劳测试的闭环控制。相比传统 PID 方案,系统超调量显著降低,动态响应速度提升16%,适用于高精度材料疲劳寿命测试场景。
应用场景
汽车零部件测试:悬架系统部件、发动机曲轴等承受交变载荷零件的疲劳寿命评估。
航空航天材料检测:飞行器结构件、涡轮叶片等耐高温高压材料的可靠性验证。
机械制造质量控制:齿轮、轴承等传动部件的耐疲劳性能测试,确保设备长期运行安全。
科研教学领域:材料力学特性研究、控制算法验证的实验平台搭建。
硬件选型
硬件模块 | 品牌型号 | 选型优势 |
伺服电缸 | 松下 MINAS A6 系列 | 定位精度达 ±0.001mm,响应频率 2.5kHz,支持实时扭矩 / 位置控制,适配疲劳试验的高频往复运动需求 |
运动控制卡 | NI PCIe-7845R | 基于 FPGA 架构,支持 24 路数字 I/O 与高速脉冲输出,通过 LabVIEW 可直接调用 API 实现纳米级运动规划 |
位移传感器 | 基恩士 LJ-G080 | 激光测距精度 ±0.1μm,采样频率 10kHz,满足引伸计高精度位移反馈需求 |
数据采集卡 | NI USB-6366 | 16 位 ADC 分辨率,8 通道同步采样,支持热插拔与即插即用,适配 LabVIEW 实时数据采集模块 |
力传感器 | HBM U10M | 量程 0-50kN,非线性误差 < 0.02% FS,通过 LabVIEW 驱动可实时生成应力 - 应变曲线 |
软件架构
模糊 PID 控制核心
模糊逻辑构建:利用 LabVIEW 模糊系统设计器,定义偏差 e、偏差变化率 ec 为输入,ΔKp/ΔKi/ΔKd 为输出,采用 {NB,NM,NS,ZO,PS,PM,PB} 七档模糊子集,高斯形与三角形隶属度函数组合。通过 9×9 规则表实现参数自适应调整,例如 “if e=PB and ec=NB then ΔKp=PB”。
实时参数整定:系统以 3ms 周期采集实际位移与设定值偏差,经模糊推理后动态修正 PID 参数,通过 “FL 模糊控制器” 与 “PID 控制器” 函数簇实现闭环调节。
协同工作
运动控制模块:调用松下伺服专用 DLL,通过 LabVIEW 生成 S 型加减速脉冲序列,经 NI 运动控制卡发送至驱动器,实现 ±0.01mm 级位移控制。
数据采集模块:基于 NI-DAQmx 驱动,同步采集力传感器与激光位移计数据,实时绘制载荷 - 位移曲线,并存储至 TDMS 格式文件。
人机交互界面:采用 LabVIEW 图形化面板,集成参数设置(加载频率、位移幅值)、实时波形显示、故障诊断(过流、超程报警)功能。
架构优势
图形化开发效率:相比 C++/MATLAB,LabVIEW 通过数据流编程减少代码量,开发周期缩短 40%,调试时可实时监控各模块数据流向。
硬件无缝集成:内置 NI、松下等品牌驱动库,无需编写底层接口,直接通过函数节点实现伺服电机启停、传感器校准等操作。
算法快速迭代:模糊规则表可通过 Excel 导入导出,便于工程师优化控制策略,支持在线修改 PID 参数并实时观察控制效果。
跨平台兼容性:支持 Windows/Linux 系统部署,可通过 OPC UA 协议与工厂 MES 系统对接,实现测试数据云端管理。
架构特点
对比维度 | 本方案(LabVIEW + 模糊 PID) | 传统方案(C+++ 传统 PID) |
开发门槛 | 图形化编程,工程师 1 周可掌握 | 需精通 C++ 与硬件驱动开发,周期 3 个月 + |
控制精度 | 超调量 < 0.005mm | 超调量 0.015-0.02mm |
动态响应 | 0.23s 达到稳态 | 0.39s 达到稳态 |
维护成本 | 可视化调试界面,故障定位时间 < 10min | 需逐行调试代码,平均定位时间 4h |
扩展性 | 新增传感器可通过模块拖拽实现 | 需修改底层驱动,开发周期 2 周 + |
问题与解决
伺服电缸振动抑制
问题:高频往复运动(10Hz)时电缸出现共振,导致位移曲线波动。
解决:在 LabVIEW 中加入陷波滤波模块,针对电缸固有频率(87Hz)设计 IIR 滤波器,结合速度环 PID 参数优化(Kp 从 30 降至 22,Kd 从 0.03 增至 0.05),振动幅值从 0.012mm 降至 0.003mm。
模糊规则表优化
问题:初始规则表在大载荷(>30kN)下响应滞后。
解决:引入加权因子动态调整规则优先级,当载荷 > 阈值时,增强 “大偏差快速调节” 规则权重,通过 LabVIEW 的 “公式节点” 实现实时权重计算,响应时间缩短 0.15s。
多传感器时钟同步
问题:力传感器与位移计采样不同步导致曲线失真。
解决:利用 NI 数据采集卡的 PFI 时钟输出功能,为所有传感器提供统一 10kHz 同步时钟,通过 LabVIEW “同步采样” VI 配置触发机制,时间误差 < 10μs。

