3D 视觉在镜头点胶中的应用:异形 / 曲面 / 高度差场景解决方案 点击:5 | 回复:0

随着光学产品向小型化、异形化、高集成度发展,镜头结构不再局限于标准圆形平面。手机潜望式镜头、车载广角镜头、工业异形镜头模组,普遍存在曲面弧面、不规则外形、多段高度差、微小台阶间隙等复杂特征。传统 2D 视觉点胶仅能处理平面、规则轮廓工件,面对三维变化时易出现胶路偏移、断胶、溢胶、高度不准、虚粘漏封等问题,良率与效率难以保障。
3D 视觉技术的引入,将镜头点胶从二维平面引导升级为三维立体感知 + 实时轨迹补偿,成为解决异形、曲面、高度差场景的关键方案。本文从技术原理、场景痛点、系统构成、落地优势与实践案例,系统解析 3D 视觉在精密镜头点胶中的应用价值。
1. 异形轮廓:无规则边缘,2D 对位易跑偏
异形镜头(如椭圆、多边形、切角模组)边缘特征复杂,2D 视觉仅靠平面轮廓匹配,易受光照、反光、色差干扰,定位偏差≥0.1mm即可能污染光学面或粘接失效。
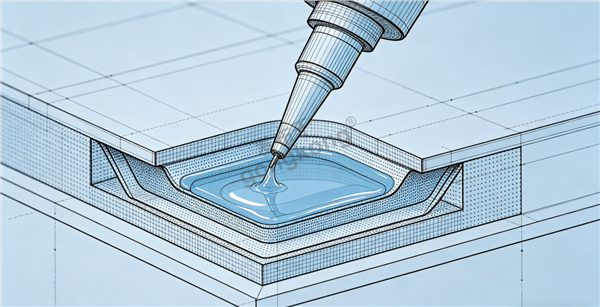
2. 曲面 / 弧面:Z 向高度连续变化,胶路忽高忽低
车载广角、潜望式镜头的镜筒与镜片贴合面常为球面 / 弧面,2D 点胶机针头高度固定,曲面高点易撞针、溢胶,低点易断胶、虚粘,胶宽一致性差。
3. 高度差 / 台阶:多平面过渡,Z 向补偿缺失
镜头模组存在0.1–2mm 微小台阶、高低错落贴合位,2D 无法感知深度,固定 Z 轴下胶路忽厚忽薄、密封不连续,尤其影响防水与抗振性能。
4. 工件一致性差:来料翘曲、装夹偏移,治具无法修正
薄壁镜筒、塑胶模组易有 **±0.1mm 翘曲或装夹偏差 **,传统靠治具硬定位,无法实时纠偏,批次良率波动大。
二、3D 视觉点胶技术原理:从 “平面看” 到 “立体算”
3D 视觉点胶核心是三维形貌感知 + 多轴联动实时补偿 + 智能路径规划,实现 “看到立体、算准轨迹、随形点胶”。
1. 三维感知:获取轮廓与深度
主流方案分两类:
激光轮廓扫描(线激光):高速扫描工件截面,生成2.5D 高度图,精度 ±5–20μm,适配反光金属、深色塑胶,抗干扰强。
结构光 3D 成像:投射编码光,一次拍摄获取完整 3D 点云,精度 ±10–50μm,适合复杂曲面与异形件全域建模。
2. 立体匹配与轨迹生成
3D 点云与CAD 模型自动对齐,识别实际轮廓、高度差、曲面曲率,生成三维空间点胶轨迹(含 X/Y/Z/ 姿态角),拐点、曲面处自动减速,避免胶堆积。
3. 多轴联动与实时补偿
系统驱动X-Y-Z + 旋转轴联动,点胶过程中毫秒级(<50ms)调整针头高度与姿态,保持恒定出胶距离(0.1–0.3mm),确保胶宽均匀、连续无断胶。
4. 智能控胶闭环
结合压力 / 流量反馈 + 高度变化联动,动态调节出胶压力与速度:高度升高→微量增压;高度降低→微量减压,胶量一致性控制在 **±3%** 内。
三、典型场景解决方案:异形 / 曲面 / 高度差
场景 1:异形镜头模组(椭圆、切角、多边形)
痛点:边缘不规则、反光强、2D 定位不稳。
3D 方案:线激光扫描获取轮廓高度,亚像素边缘提取 + AI 姿态识别,定位精度 ±0.01mm;自动生成贴合异形边缘的封闭轨迹,拐点平滑过渡,无拖丝、无堆积。
效果:不良率从 2.5% 降至 0.3%,换型时间 < 10 分钟。
场景 2:曲面 / 弧面镜筒密封(车载广角、潜望式)
痛点:弧面 Z 向连续变化、胶宽不均、易溢胶。
3D 方案:结构光 3D 建模,生成随曲率变化的螺旋 / 圆弧轨迹;Z 轴实时补偿(±2mm 范围),针头始终垂直曲面,胶宽波动 < 0.05mm。
效果:防水不良率从 1.8% 降至 0.2%,胶宽一致性提升 40%。

场景 3:多高度差模组(台阶、多层贴合、间隙密封)
痛点:0.1–1mm 台阶、高低过渡、密封不连续。
3D 方案:3D 点云识别台阶高度与边缘,分段规划轨迹 + Z 向阶梯补偿;台阶处自动降速、微量增胶,确保高低处胶厚一致、密封连续。
效果:漏胶 / 断胶不良率从 3.2% 降至 0.4%,抗振测试通过率提升 25%。
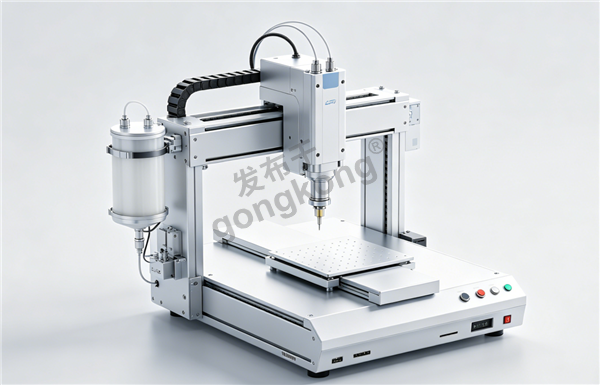
四、3D 视觉点胶系统构成与关键指标
一套完整的 3D 视觉镜头点胶系统,由视觉单元、运动单元、点胶单元、控制软件组成:
表格

行业落地中,设备重复定位精度≥±2μm、3D 定位精度≥±10μm、胶宽一致性≥±0.05mm,可满足高端光学镜头批量生产要求。
五、工程实践与软植入
在光学制造向高精度、柔性化、多品种小批量转型过程中,设备方案的稳定性、易用性、适配性直接影响产线落地效率。湖北锐翼智航深耕精密光学自动化装备领域,针对镜头异形、曲面、高度差等三维场景,基于 3D 视觉与多轴联动控制技术,开发了适配光学无尘车间的精密点胶解决方案。方案兼顾微米级精度、快速换型、稳定批量生产,可快速对接不同规格镜头模组,助力光学工厂在复杂结构点胶场景中提升良率、降低损耗,适配行业高端化升级需求。
六、总结:3D 视觉重新定义精密点胶边界
2D 视觉解决了 “平面点不准”,而3D 视觉解决了 “立体控不稳”。在异形、曲面、高度差等复杂镜头场景中,3D 视觉通过三维感知、实时补偿、智能规划,实现了从 “能点” 到 “点得准、点得稳、点得一致” 的升级。
未来,随着 AI 算法与 3D 传感技术进一步融合,3D 视觉点胶将向更高精度、更快速度、更智能自适应方向发展,成为光学智造升级的核心支撑技术之一。





楼主最近还看过

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
