【正运动技术】机械手相关基本知识 点击:313 | 回复:0

1.工业机械手定义
工业机械手,依据国际标准化组织(ISO)的技术报告,被定义为“一种具备自动控制、 可重复执行预设程序、功能多样且拥有多个自由度机械特性的机械设备”。简而言之,现代工业机械手是模拟人类手腕与手掌动作机能,集多种动作功能于一体的自动化装置。
工业机械手凭借其卓越的多动作操作能力,极大地推动了多品种、小批量生产自动化的发展进程,使得过去难以实现的复杂生产任务变得高效可行。
2.空间中的自由度
在三维空间中,一个未受约束的物体理论上拥有六个自由度:沿三个正交方向(X、Y、Z)的平动自由度,以及绕这三个方向(RX、RY、RZ)的旋转自由度。当物体被限制在某 一平面(如XY 平面)上时,其自由度减少至三个:沿 X、Y 方向的平动自由度及绕垂直于该平面的轴(Z 轴)的旋转自由度。
以标准SCARA 机械手为例,其末端执行器具备四个自由度:可在XY 平面内移动(2 轴)、绕 Z 轴旋转(3 轴)以及沿Z 轴方向升降(4 轴)。相比之下,六自由度机械手则能 在三维空间内实现任意运动,因此拥有六个自由度。
3.坐标系
(1)关节坐标系
关节坐标系涵盖了机械手的所有关节,各关节之间相互独立,坐标单位通常为角度,简写为J。操作某一关节时,不会影响其他关节的坐标值。例如,在初始状态下,所有关节的坐标均设为0°(J1:0°, J2:0°, J3:0°, J4:0°, J5:0°, J6:0°)。
(2)世界坐标系
世界坐标系是固定在空间中的标准直角坐标系,其位置根据机械手的具体类型确定。在虚拟轴操作中,机械手的运动是基于世界坐标系进行的,此时各关节会自动计算所需的旋转角度。
4.关节轴与虚拟轴
(1)关节轴
关节轴指的是机械结构中的实际旋转关节,在程序中通常以旋转角度表示(某些结构中 也可能为平移轴)。由于电机与旋转关节之间存在减速比,因此在设置单位时需按照实际关 节旋转一圈来设定,同时在填写结构参数时,应以旋转关节中心为准,而非电机轴中心。
(2)虚拟轴
虚拟轴是抽象出来的概念,代表世界坐标系的六个自由度(X、Y、Z、RX、RY、RZ),可视为直角坐标系的三个直线轴和三个旋转轴。虚拟轴用于确定机械手末端执行器的加工轨 迹与坐标。若某框架的虚拟轴包含RX、RY、RZ,则该框架的末端坐标系矩阵可通过旋转 矩阵计算得出:末端坐标系矩阵= Rotz(Rz) * Roty(Ry) * Rotx(Rx),先Roll(X 轴)→再Pitch(Y 轴)→最后Yaw(Z 轴)。这是典型的Z-Y-X 欧拉角(Yaw-Pitch-Roll)定义,先绕X 轴转Rx→再绕Y 轴转Ry→最后绕Z 轴转Rz,但每一步的旋转轴都是“已经被前面旋转过的未端坐标系轴”。
5.正解运动与逆解运动
(1)正解运动
通过操作关节坐标,并结合机械结构参数,可计算出末端执行器在直角坐标系中的空间位置,这一过程称为正解运动。在正解模式下,操作的是实际关节轴,而虚拟轴的坐标则由 系统自动计算。控制器使用CONNREFRAME 指令建立正解模式,该指令作用于虚拟轴。在此模式下,虽只能操作关节轴,但关节轴可执行各种运动,不过实际运动轨迹并非直线或圆弧。正解模式通常用于手动调整关节位置或上电点位回零。
(2)逆解运动
给定直角坐标系中的一个空间位置,反推出各关节轴的坐标,这一过程称为逆解运动。在逆解模式下,操作的是虚拟轴,而实际关节轴的坐标则由系统自动解算并驱动运动。控制器同样使用CONNFRAME指令建立逆解模式,但此时该指令作用于关节轴。在此模式下,只能操作虚拟轴,虚拟轴可在笛卡尔坐标系中执行直线、圆弧、空间圆弧等运动,关节轴则在CONNFRAME指令的作用下自动运动至逆解后的位置。
6.机械手姿态
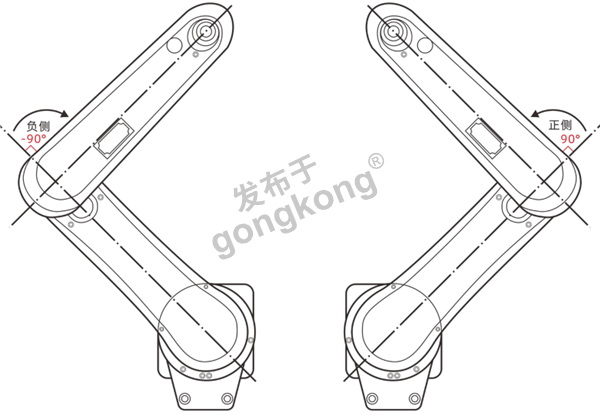
从数学角度来看,机械手姿态指的是同一组虚拟轴数值对应的多组关节轴解。即机械手在笛卡尔坐标系中运动到某一坐标点时,可以有多种运动轨迹,这些轨迹对应着不同的姿态。
如下图SCARA的两种姿态,在X方向运动,关节轴可以有两种运动方式。
对于六轴机械手而言,其姿态的多样性和复杂性更为显著。姿态多样性:六轴机械手由于拥有六个自由度,其姿态的多样性远超四轴或SCARA机械手。例如,在执行焊接任务时,不同的焊接姿态会影响焊接质量与效率。通过调整各关节角度,可实现多种焊接姿态,如垂直焊接、倾斜焊接等,以满足不同工件的焊接需求。姿态与稳定性:机械手的姿态不仅影响作业效率,还关系到机械手的稳定性和精度。例如,在装配任务中,合适的姿态能减少误差,提高装配精度。姿态规划:在实际应用中,为避免碰撞、提高作业效率,需对机械手姿态进行合理规划。例如,在搬运重物时,需确保机械手处于稳定姿态,以保证搬运过程的平稳与安全。工业机器人行业里常说起6自由度机械手三类奇异点,分别是肩部奇异点、肘关节奇异点、腕关节奇异点,共形成8组逆解。

7.奇异点
当机械手运动到某一特定位置时,可能会失去某个自由度,这个位置被称为奇异点。在实际应用中,应尽量避免机械手进入奇异点。 如SCARA机械手完全伸直时,此时无法在X 方向平动,操作往X 负向运动时,结构无法判断使用哪种姿态运动,此时结构会卡住。为避免出现此种问题,需要正解时调整好姿态,逆解时规划好轨迹。
对于六轴机械手,奇异点的情况更为复杂。
结构限制:六轴机械手在特定姿态下,如某些关节轴处于极限位置时,可能出现奇异点。例如,当某个旋转关节达到机械限位时,机械手可能无法沿某一方向平动或旋转,导致运动 受限。
影响与规避:奇异点会导致机械手运动不稳定,甚至可能损坏机械结构。为避免此类问题,需在编程时进行姿态检查与调整,确保机械手在运动过程中不进入奇异点区域。例如,在规划路径时,可通过逆解运动提前预判奇异点位置,并调整运动轨迹,使机械手绕过奇异点,保证运动的连续性与稳定性。
多轴协同的复杂性:六轴机械手由于关节多、自由度高,其奇异点问题较四轴、SCARA机械手更为复杂。需综合运用各轴的运动特性,通过合理规划各轴的运动顺序与幅度,来规避奇异点带来的影响。
8.零点位置
在建立机械手算法时,需要设定一个零点位置作为参考,并确定电机的转向。六轴机械手因结构复杂,其零点位置与电机转向需精确标定与调整,以确保机械手启动与运行时的精准定位。
9.正运动机械手模式
机械手有几个电机称为几关节机械手,控制实际机械关节运动的电机轴称为机械手的关节轴,所有的关节轴构成关节坐标系,关节轴在此坐标系中按角度旋转。控制机械手末端工作点在世界坐标系下运动,世界坐标系的坐标轴假想为虚拟轴,按距离单位移动。关节轴和虚拟轴通过CONNREFRAME 或CONNFRAME 指令来指明,只要轴数足够,控制器支持多机械手。程序可以通过运动指令(所有的运动指令都可以使用)控制关节轴或虚拟轴运动,但同一时刻只能操作虚拟轴或者关节轴。操作关节轴运动时,虚拟轴需要位于CONNREFRAME 模式,从而自动指向当前的空间坐标;操作虚拟轴运动时,关节轴需要位于CONNFRAME模式,从而自动指向当前的关节轴坐标。机械手建立是通过CONNREFRAME(正解)和CONNFRAME(逆解)指令,CONNREFRAME 时虚拟轴MTYPE(运动类型)值为34,CONNFRAME 时关节轴MTYPE 值为33,可以通过MTYPE 来查看特定轴是否位于对应的模式。通过CANCEL 或RAPIDSTOP 指令可以取消机械手模式。
注意:
机械手处于逆解模式时关闭使能,此时推动机械手,机械手反馈位置mpos 变化了,但虚拟轴的位置不变,逆解实时计算输出的dpos不变,导致mpos 和dpos不一致,重新给使能会飞车。使用机械手frame,每个frame都需要通过table传入参数,table的臂长和一圈脉冲数不能为0,同时进入正逆解之后,table的数据不能中途改变,否则会飞车。建议table使用规划和保护,避免出现问题。





楼主最近还看过

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
