LabVIEW巡检机器人高精度轨迹跟踪虚拟仿真系统 点击:155 | 回复:0

基于LabVIEW 2019通实现算法可视化集成、多维度数据实时监测与仿真场景动态交互,解决传统轨迹跟踪依赖预设路径、抗干扰能力弱、误差累积等问题,可直接复用于电力、化工、仓储等领域的巡检机器人研发与调试。
LabVIEW功能
1. 轨迹建模与参数配置模块
(1)节点与运动模型构建
基于 LabVIEW “数组与簇” 控件定义巡检节点属性,支持导入 Excel 格式的节点坐标表(含巡检点编号、世界坐标 (x,y)、优先级、电量补给点标记),最多可支持 100 个巡检节点的批量导入与管理。
通过 LabVIEW 数学脚本节点(MathScript Node)编写运动学模型公式,直接嵌入原文核心算法:
支持动态配置电量阈值(默认 20%,可通过滑动控件调整),当机器人剩余电量低于阈值时,自动触发 “返回充电桩” 路径重规划。
(2)算法参数可视化配置
遗传算法参数面板:通过 LabVIEW 数值输入控件设置种群规模(默认 50)、迭代次数(建议 1000 次,支持 100-5000 次可调)、交叉概率(默认 0.8)、变异概率(默认 0.05)、适应度修正参数 δ(初始值 0.1,随迭代次数线性递减)。
分数阶模糊 PID 参数面板:提供阶数 σ(0.5-1.5 可调)、τ(0.3-1.2 可调)、比例增益 k_p(1-10)、积分增益 k_i(0.1-2)、微分增益 k_d(0.01-1)的实时调整控件,调整结果即时同步至控制算法。
2. 改进遗传算法路径寻优模块
(1)核心逻辑可视化编程
种群初始化:通过 “随机数生成器” 控件生成初始路径种群,每个个体以 “整数数组” 形式存储巡检节点顺序(如 [3,1,7,2,...]),利用 LabVIEW “条件结构” 过滤重复节点路径,确保每个巡检点仅遍历 1 次。
选择操作:基于原文式 6(P_a = f_a / Σf_i),通过 LabVIEW “累计概率计算” 子 VI 实现轮盘赌选择,子 VI 内部逻辑为:
计算每个个体适应度 f_i(基于式 5:F=1/(1+δ+D),D 为路径总长度);
归一化得到选择概率 P_a;
生成 0-1 随机数,匹配累计概率区间确定选中个体。
双点交叉实现:通过 “数组索引控件” 随机选取 2 个交叉点(如索引 2 和 5),对选中的两个父代路径进行片段交换,例如:
父代 1:[1,2,3,4,5,6,7] → 交叉后:[1,2,6,5,4,3,7]
父代 2:[7,6,5,4,3,2,1] → 交叉后:[7,6,3,4,5,2,1]
单点变异优化:通过 “布尔判断控件” 触发变异,随机选取路径数组中 1 个索引位置,交换该位置与相邻位置的节点编号,避免算法陷入局部最优(变异后需重新校验路径合法性)。
(2)寻优结果实时输出
通过 LabVIEW “波形图表” 实时绘制每代最优路径长度变化曲线,迭代收敛后自动输出最优路径节点顺序、总里程、平均节点间距等数据,支持 TDMS 格式导出(含每代种群的适应度分布、最优个体路径信息)。
仿真与数据监测模块
(1)场景搭建与机器人建模
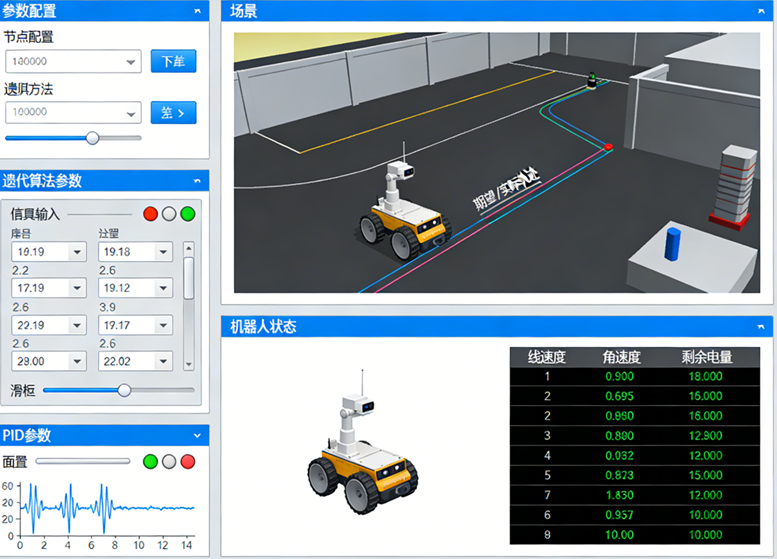
基于 LabVIEW “3D Picture Control” 控件构建仿真场景,导入变电站 / 工厂平面 CAD 图纸(支持 DXF 格式),通过 “3D 控件库” 添加巡检设备(箱柜、充电桩)、障碍物(墙体、设备支架)等模型,支持场景缩放、旋转与视角切换。
机器人模型采用 “组合 3D 对象” 实现,包含机身(立方体)、激光雷达(圆柱体)、摄像头(球体),通过 “3D 属性节点” 绑定实际运动参数(线速度 v 控制移动距离,角速度 w 控制转向角度),实时同步轨迹坐标。
(2)多维度数据可视化
实时监测面板:
轨迹跟踪曲线:通过 “XY 图表” 同步显示 “期望轨迹”(红色实线)与 “实际轨迹”(蓝色虚线),支持鼠标悬停查看具体坐标与误差值;
误差趋势图:绘制 10s 内轨迹误差变化(对应原文图 9、10),横轴为时间 t(0-10s),纵轴为里程误差(-0.4~0.4km),自动标记最大误差点;
状态指示灯:通过布尔控件显示 “算法运行状态”(绿 = 运行,红 = 暂停)、“信号干扰状态”(黄 = 干扰存在)、“电量状态”(绿 = 充足,橙 = 低电量,红 = 急需补给)。
5. 数据存储与分析模块
存储格式:采用 LabVIEW 原生 TDMS 格式,单文件可存储 100 组仿真数据,每组包含 “时间戳、节点编号、实际坐标、期望坐标、误差值、PID 参数、机器人速度、干扰强度” 等 18 项数据。






官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
