【正运动技术】振镜小课堂开课啦! 点击:623 | 回复:0

1.振镜工作原理
激光振镜是一种专门用于激光加工领域的特殊的运动器件,它靠两个振镜反射激光,形成 XY 平面的运动。激光振镜不同于一般的电机,激光振镜具有非常小的惯量,且在运动的过程中负载非常小,只有两个小的反射镜片X和Y,分别用不同的电机控制偏转,系统的响应非常快。

激光振镜运动两种基本的运动:一种为跳转运动,一种为打标运动。
跳转运动的过程中,轴移动到要加工的位置,激光呈关闭状态,不影响轨迹的加工,因此可以以很大的速度运动。打标运动过程中,激光呈开启状态,进行轨迹的加工,因此用户需要根据实际加工要求设置合适的运动的速度。
振镜是一种优良的矢量扫描器件。它是一种特殊的摆动电机(激光振镜),基本原理是通电线圈在磁场中产生力矩,但与旋转电机不同,其转子上通过机械纽簧或电子的方法加有复位力矩,大小与转子偏离平衡位置的角度成正比,当线圈通以一定的电流而转子发生偏转到一定的角度时,电磁力矩与回复力矩大小相等,故不能象普通电机一样旋转,只能偏转,偏转角与电流成正比。
2.振镜控制系统基本结构
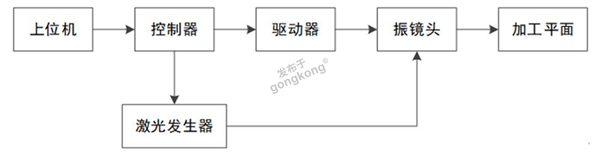
振镜系统的由以上几个部分组成一个基础系统,其中振镜头主要元件为X/Y两个反射镜片、分别控制X/Y镜片旋转的两个电机,根据实际需求还可加入人机操作系统、编码器等。
3.对控制器的基本要求
因为激光打标机是靠X/Y振镜偏转的配合,将激光反射到工作台面上,进行精确的雕刻。而振镜的控制是由控制器开环控制的,所以要求必须为线性,即输入信号同偏转角度之间为线性关系。因振镜是快速精密机械,所以要求从一个工作状态到另一个工作状态要求加速度越大越好,这样,打标空等时间就无限小。
振镜运动采用缓冲区运动方式,即用户需要向轴运动缓冲区传递运动及工艺数据,然后启动缓冲区运动,运动控制器则会依次连续执行用户所传递的运动数据,直到所有的运动数据全部运动完成。
在激光振镜运动控制系统中不但有运动的控制,还有激光的控制。如何有效地处理振镜运动和激光开关的配合是一个很重要的问题,只有有效的协调了激光和运动的关系,才能运动出精确的轨迹。
运动控制:打标运动时,激光会按照设定的打标速度沿着给定的打标轨迹运动,在执行打标相关指令时,激光振镜运动控制器会自动开启激光。如果下一条仍是打标指令,激光一直呈开启状态,直到最后一条打标指令结束,或缓存区指令执行完毕,中途在缓冲区若遇到跳转指令,则激光自动关闭,直到遇到打标指令,激光才重新开启。开始运动前为保证打标轨迹正确需调整振镜坐标,同时清空缓冲区。
激光控制:主要包括控制激光的开关控制与发出激光的时长,控制激光的开断使用OP指令,激光能量的控制可根据激光器的不同,对应通过模拟量,数字量输出口,以及输出口PWM的占空比对应控制能量的大小。
4.主要应用
主要用于激光打标,包括激光切割、舞台灯光控制、激光打孔等。是一种非接触式、无污染、无磨损的新标记工艺,采用自动化控制,可靠性大大提高。激光打标是利用高能量密度的激光束,随着激光束在材料表面有规律的移动,同时控制激光束的开断,使目标材料表面发生物理或化学变化,激光束就可以在材料表面加工出一个指定的图案。
相比传统标记工艺,激光打标有如下优点:
标记速度快,字迹清晰。
非接触式加工,污染小,无磨损。
工作方便,防伪能力强。
高速自动运行,生产成本低,运行可靠。
5.XY2-100振镜协议
ZMC420SCAN支持XY2-100振镜协议。
在振镜控制系统中,XY2-100协议作为数字化激光扫描振镜的接口定义及通信协议被广泛地使用。通讯协议是指双方实体完成通信或服务所必需遵循的规律和约定,XY2-100协议包括四路信号:SENDCK(时钟信号)、SYNC(同步信号)、CHANNEL X(X通道数据)、CHANNEL Y(Y通道数据),这四路信号是一种同步串行传输过程。
数据时序结构如下图所示:
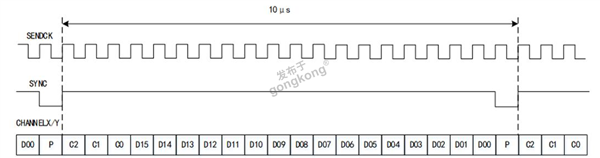
SENDCK信号是一个频率为2MHz的时钟信号,当它从低电平到高电平跳变时,数据位被写入;当它从高电平到低电平跳变时,数据位被反射系统采样。
SYNC信号用于提供数据转换的同步信息,当它从低电平到高电平时第一位数据被发送;从高电平到低电平时最后一位校验位被发送。
CHANNEL X/Y是数据信号,它由20位组成,其中C2、C1、C0是振镜运动方向值,参考值为001,D15 ~D0是数据位,它是16位二进制数,用来控制振镜转过的角度大小,最后一位P为奇偶校验位,当发送的数据中有偶数个“1”时,对应校验位为“0”,当发送的数据中有奇数个“1”时,对应校验位为“1”。
6.振镜矫正
振镜一般是需要通过对振镜的矫正来实现,控制振镜移动准确的位置距离,振镜矫正实际上是进行一个理论振镜移动距离与实际振镜移动距离建立一种对应关系,然后在移动的过程中将对应的移动距离与建立的关系相结合,从而达到振镜准确移动位置的目的,达成振镜矫正的效果。
振镜矫正指令如下:
ZSCAN_CORRECT(ixy,imode,imaxline,imaxrow,x1,y1,x2,y2,tableindex)
ixy:值为0或1,两个振镜选择;0-第一个振镜,1-第二个振镜
imode:0-关闭矫正功能;1-使用分区矫正
imaxline:行数,Y方向的点数为行数
imaxrow:列数,X方向的点数为列数
x1,y1,x2,y2:理论的左下角与右上角的位置
tableindex:测量的实际坐标开始存储的table索引,先X再Y,先第一行(按列数存储),再下一行
振镜矫正点数最多支持64*64的矫正点数量,以建立左下角以及右上角的理论坐标,并且通过该理论坐标与写入对应TABLE数组中的测量出的实际图形坐标进行对应的处理,对当前连接振镜接口的振镜轴进行矫正,振镜矫正参数是断电不保存的,因此在使用过程中需注意,重新上电后需要重新进行矫正振镜。
振镜是绝对值系统, 上电之后控制器就一直处于和电机通信的状态, 修改振镜轴DPOS会引起振镜的偏移,因此在振镜使用过程中不要随便修改振镜轴的DPOS值,如果需要运动,可以通过MOVEABS移动到对应的位置。





楼主最近还看过

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
