LabVIEW的Modbus 主从站读线圈功能 点击:230 | 回复:0

基于LabVIEW及 Modbus 协议,利用 “Read Coils” 相关 VI 实现 Modbus 主站读取从站线圈值、从站响应主站读请求的功能,用于工控场景中设备状态监测与数据交互,依赖 LabVIEW 数据记录与监控控制模块。
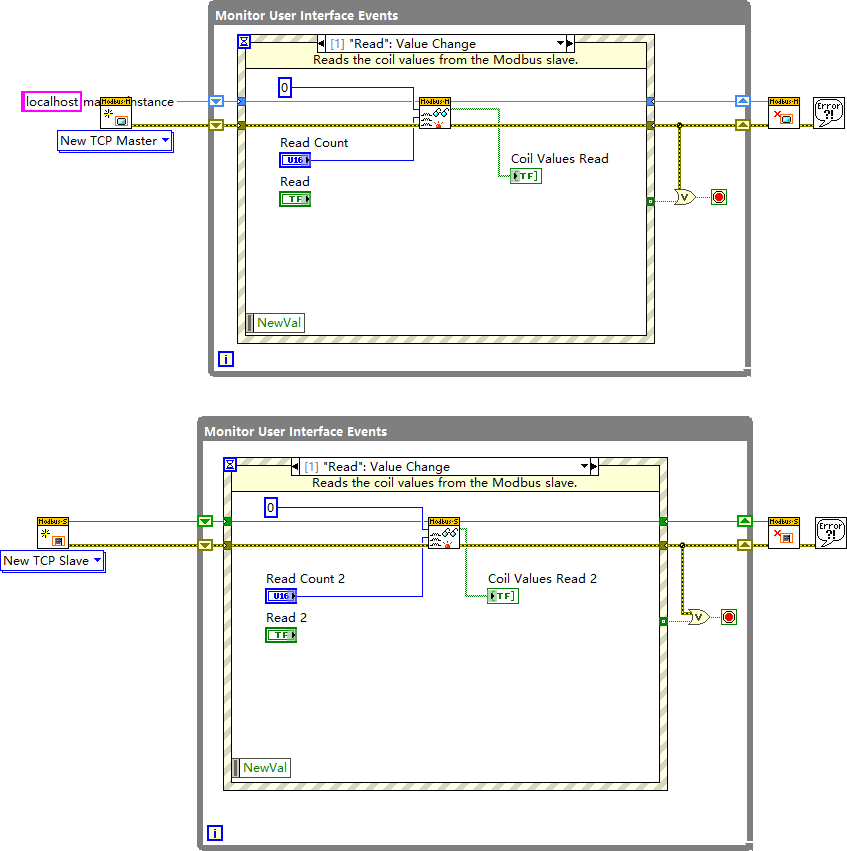
主站 “读线圈”(New TCP Master)
(一)功能
通过 “Read Coils VI”,主站主动向 Modbus 从站发起请求,按 “Read Count” 指定数量读取从站线圈状态,获取 “Coil Values Read” 结果,用于掌握从站离散输出 / 输入状态(如继电器、传感器触发信号)。
(二)使用场合
工控系统主站需监测从站状态时,如工厂自动化中主 PLC 读取从站设备(智能仪表、从站控制器)的线圈状态,判断设备是否触发、运行。
(三)特点
按需灵活读取:可通过 “Read Count” 设置读取线圈数量,适配不同监测需求。
基于 Modbus 标准:功能码 0x01,遵循工业通用协议,兼容性好。
(四)注意事项
数量限制:“Read Count” 不能超过从站实际线圈总数,否则可能报错或返回错误数据。
通信保障:需确保主从站网络连接稳定(TCP 链路正常),可结合超时设置(若配置),避免因从站无响应导致主站程序阻塞。
(五)类似功能对比
与 “读保持寄存器” 功能对比,“读线圈” 针对离散状态(布尔值),如设备开关;“读保持寄存器” 针对模拟量、累计值等连续数据(如温度值、计数器数值),应用场景不同。
从站 “读线圈”(New TCP Slave )
(一)功能
从站通过 “Read Coils VI” 响应主站读请求,依据主站 “Read Count 2”,返回自身对应数量线圈的 “Coil Values Read 2” 状态,配合主站完成数据交互,是从站反馈自身状态的关键环节。
(二)使用场合
从设备(智能传感器、从站控制器)需向主站上报线圈状态时,如从站继电器线圈状态变化后,主站读取时从站准确反馈。
(三)特点
被动响应:需主站发起读请求后触发,保障主从交互流程有序。
状态同步:实时反馈自身线圈最新状态,确保主站获取数据准确。
(四)注意事项
协同主站:需与主站读操作协同,线圈状态需及时、准确更新(如硬件状态变化后,程序内线圈值同步),否则主站读取旧数据,影响判断。
从站运行:从站程序需持续稳定运行,若异常退出,无法响应主站请求,导致通信中断。
(五)类似功能对比
与从站 “写线圈” 功能对比,“读线圈” 是反馈自身状态,“写线圈” 是接收主站控制指令改变自身线圈状态,一为反馈、一为执行,功能相反但共同支撑主从站交互。
主从协同逻辑
主站 “读线圈” 主动发起请求(按设定数量读)→ 从站 “读线圈” 被动响应(返回对应数量线圈状态)→ 主站获取数据用于状态监测 / 控制决策,实现 Modbus 主从通信中线圈状态交互的完整流程,是工控网络中设备间数据共享、协同控制的基础应用。






官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
