工业自动化通信协议转换与运动控制深度结合的工程实践 点击:104 | 回复:0

工业自动化通信协议转换与运动控制深度结合的工程实践
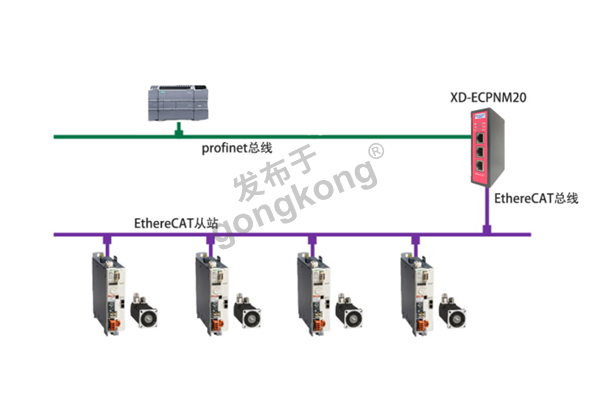
在工业自动化领域,不同通信协议间的数据互通常成为技术难点。某智能仓储项目中,工程师通过EtherCAT主站转Profinet网关连接汇川伺服系统,实现了机械臂搬运轨迹的精准控制,其中轮廓加减速度功能使货物搬运效率提升23%,这一案例揭示了协议转换与运动控制深度结合的工程价值。

支持Profinet与EtherCAT双向通信的协议网关(如XD-ECPNM20型号),本质上承担着工业数据协议翻译器的角色。该设备通过嵌入式芯片实时解析Profinet IO数据报文,将其转换为EtherCAT主站可识别的过程数据对象(PDO),传输速率可达每周期1ms,如同在两种通信协议间架设了直连高速公路。实际应用中,网关的Configuration Manager软件可将西门子PLC的Profinet网络参数自动映射至EtherCAT从站设备,避免了传统方案中PLC需额外处理协议栈的算力消耗。
在汇川伺服驱动器的二次开发中,工程师需先删除原有封装轴模块,通过SoftMotionLight CiA402轴重构控制架构。上位机通过Sml_Basic函数库发送目标位置(8000脉冲)、基准速度(3000rpm)及S型加减速曲线参数,伺服内置的轨迹发生器随即生成连续的位置指令,其原理类似车辆起步时平缓加速、停车时渐进减速,有效抑制了机械臂运动时的惯性震动。某汽车焊装线实测数据显示,采用7段S曲线算法后,机械臂末端抖动幅度由±1.2mm降至±0.3mm。

软件配置包含三大步骤:
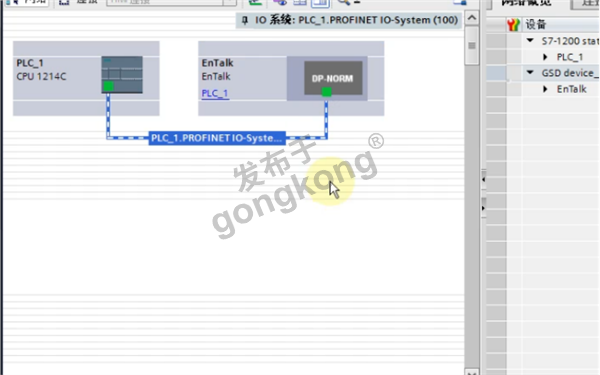
使用TIA Portal建立Profinet网络拓扑,分配设备名称
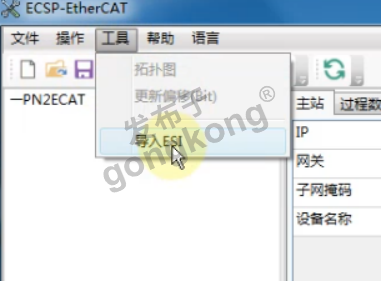
在EtherCAT主站转Profinet网关配置工具中导入EDS文件,建立输入输出数据映射表
PDO映射如下图所示,从0开始偏移16个位那么第二条就是从16开始偏移8个位那第三条就是从24开始,就这样依次类推
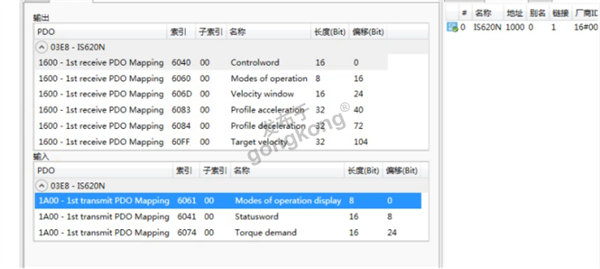
在TIA Portal软件上面可以看到分配的Q地址是64开始的那就是从64开始2个字节是第一条,66开始一个字节是第二条,67开始2个字节是第三条,69开始4个字节是第四条

项目实施后的维护数据显示,采用该架构的设备平均无故障时间(MTBF)达到8600小时,较传统脉冲控制方案提升41%。值得关注的是,在2024年某锂电设备展会上,采用同类方案的六轴协作机器人实现了0.02mm级重复定位精度,其平滑的加速度曲线控制能力已接近国际一线品牌水平。这预示着国产伺服系统与工业通信技术的融合创新正打开新的应用空间。





楼主最近还看过
 工控网智造工程师好文精选
工控网智造工程师好文精选
