基于LabVIEW的伺服阀高频振动测试闭环控制系统 点击:247 | 回复:0

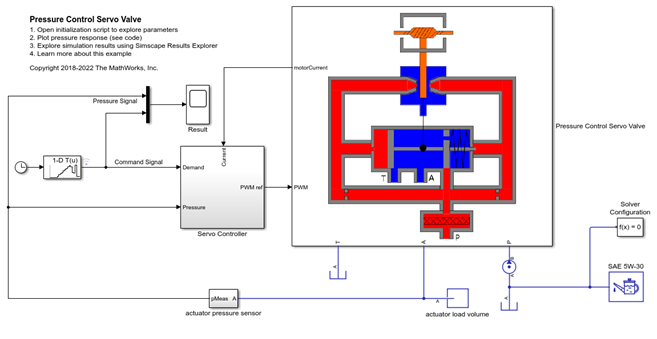
为实现伺服阀在设定位置上下快速移动(1kHz控制频率)的振动测试目标,需构建基于LabVIEW的闭环控制系统。系统需满足高速数据采集、实时控制算法(如PID或自适应控制)、高精度电流驱动及传感器反馈处理等需求。结合用户提供的伺服阀参数(如±40mA控制电流、动态性能≥25Hz、线位移传感器特性),以下提供方案设计及设备选型建议。
方案设计及选型对比
1. 控制平台选型
(1) NI cRIO系列
型号:cRIO-9045(搭载Intel Atom四核处理器,1.33 GHz)
特点:
支持LabVIEW Real-Time模块,确保1kHz控制频率的实时性;
集成FPGA(Xilinx Artix-7)用于高速信号处理;
模块化设计,可扩展模拟输入/输出(如NI 9223电压采集模块、NI 9265电流输出模块)。
适用场景:高精度、高实时性要求的实验室或工业测试。
价格:整套系统(含控制器、I/O模块)约15-25万元。
(2) 倍福(Beckhoff)CX系列
型号:CX2040(Intel Celeron双核,1.1 GHz)
特点:
基于TwinCAT 3实时系统,支持EtherCAT总线通信;
支持C/C++或LabVIEW通过ADS接口集成;
扩展模块如EL3064(模拟输入)、EL4132(模拟输出)。
适用场景:工业自动化环境中的高速控制。
价格:约10-18万元。
(3) Moog伺服控制器
型号:Moog D136系列
特点:
专为伺服阀设计,内置高精度电流放大器(±80mA过载能力);
支持CANopen或EtherCAT通信;
集成动态补偿算法,适合复杂振动测试。
适用场景:航空航天、高动态性能测试。
价格:约30-50万元(含驱动模块)。
对比分析:
实时性:NI cRIO与倍福CX均支持1kHz控制频率,但cRIO的FPGA更适合高速逻辑处理;Moog方案集成度高,但成本较高。
开发便捷性:LabVIEW原生支持cRIO,开发周期短;倍福需结合TwinCAT环境,灵活性稍低。
成本:倍福性价比最优,cRIO次之,Moog最高。
2. 电流驱动模块
伺服阀采用±40mA电流控制的原因:
阀芯驱动力需求:高电流可产生足够电磁力驱动阀芯快速响应;
动态性能匹配:±40mA范围与25Hz动态带宽匹配,确保阶跃响应与振动测试需求。
推荐方案:
NI 9265模块:16位分辨率,±20mA输出(需外部放大电路扩展至±40mA);
第三方驱动板:如Advanced Motion Controls的伺服驱动器(如AZB60A8),支持±40mA输出,集成过载保护。
3. 传感器信号处理
线位移传感器接口:
激励信号:通过NI 9264模块输出6V/3kHz正弦波;
反馈采集:NI 9223模块(24位ADC,±10V输入,512kS/s)采集VA/VB信号,LabVIEW处理灵敏度误差与交叉干扰
闭环算法:
PID控制:通过LabVIEW PID工具包实现,结合前馈补偿提高响应速度;
自适应控制:针对温度漂移(-55℃~205℃),采用模糊PID或模型参考自适应算法。
4. 系统架构图
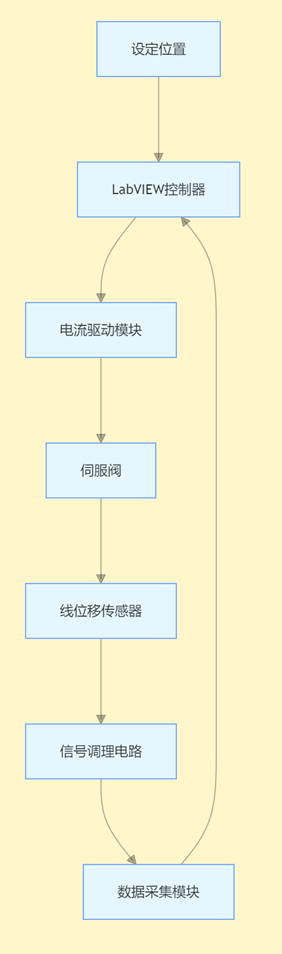
关键组件:
实时控制器:NI cRIO-9045(主控);
I/O模块:NI 9223(传感器采集)、NI 9265(电流输出);
驱动模块:AZB60A8(扩展电流至±40mA)。
5. Windows系统可行性分析
局限性:Windows非实时系统,1kHz控制周期(1ms)可能因任务调度延迟导致抖动;
解决方案:
方案1:采用LabVIEW Real-Time模块部署在cRIO或倍福CX,绕过Windows限制;
方案2:若强制使用Windows,需搭配实时扩展卡(如NI PCIe-7842R),但稳定性低于专用控制器。
总结与推荐
推荐方案:NI cRIO-9045 + 第三方电流驱动器(如AZB60A8) + LabVIEW Real-Time开发。
优势:实时性强、开发便捷、扩展灵活;
成本:约20-30万元;
适用场景:高精度振动测试、实验室研发。
备选方案:倍福CX2040 + EtherCAT驱动模块,适合预算有限且需工业集成的场景。
注:Moog方案适用于极端环境(如航空航天),但成本较高,建议按实际需求选择。






官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
