AiW 4120 系列产品:测量原理、安装全攻略 点击:218 | 回复:0
产品测量原理
ANL/AiW-4120 产品采用雷达调频连续波距离测量原理进行工作,雷达发射器通过天线发射连续变化的调制频率雷达信号,当发射波信号遇到物体介质时,雷达波信号被反射回来(称之为回波信号)。当回波信号到达雷达,被天线接收时,此时的雷达发射信号频率值与雷达接收到的回波信号频率值就存在一个频率差值;这个频率差值大小与物体距离雷达的距离值成正比,于是频率差值就对应于距离值。
调频连续波雷达物位计的测量原理,就是依据物料的回波信号的频率差值,计算出雷达与物料表面之间的距离。它采用了离散傅里叶变换(Discrete Fourier Transform,DFT)信号分析的方法,傅里叶变换是物位雷达距离测量的核心,通过把信号从时间域变换到频率域进而研究回波信号频谱和变化规律。
距离分辨率
距离测量分辨率是指两个距离相近的物体,雷达能分辨出它们是在不同位置的最小距离。
通俗的解释:距离测量分辨率是指两个物体相距较远的间隔,雷达液位计能够辨别出这是两个物体而不是一个物体并测量它们的距离的能力。
换一句话说就是:如果两个物体之间的距离小于雷达距离测量分辨率的水平,那么雷达可以测量到一个距离值,该距离不等于其中任何一个物体的距离,而是两个物体的距离值的合成值。
距离测量分辨率取决于离散傅里叶变换运算的频率分辨率
Fres :Fres = 1/T,这里T
是离散傅里叶变换运算的采样时间。频率分辨率Fres的相应距离就是雷达的距离测量分辨率Sres那么,ANL/AiW-4120
雷达的距离分辨率是多少呢?可以通过以下公式计算:Sres = C0 / 2B,
其中: C0是光速 C0 = 299792458m/s,B是调频雷达的扫频带宽,单位Hz,4120产品的扫频带宽为1GHz和3GHz 两种配置。
测量精度
雷达测量精度的含义的:如果有一个物体反射面,当这个物体移动了非常小的距离时,雷达是否可以识别/测量到这个距离的变化的能力。能分辨到移动的最小距离值的度量称为精度。
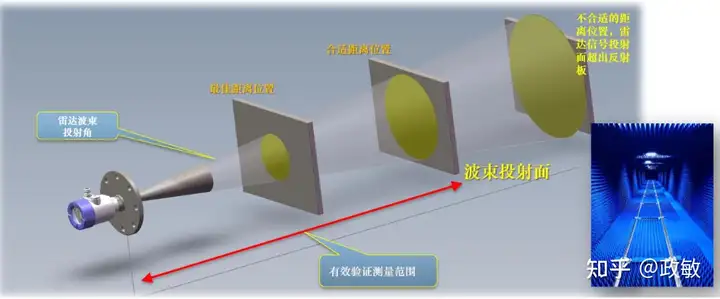
检验雷达的精度需要根据雷达天线的波束角,选择合适大小的反射面进行测量(如上图所示),如果条件许可, 可以在标准化微波暗室进行测量精度验证和标定。
产品安装指南
应用注意事项
ANL/AiW-4120
雷达变送器产品适用于符合 ANSI 61010-1
的标准和扩展的应用环境条件。可以在室内和室外使用。因此在安装之前,请确保选用的变送器产品的所有部件都适合现有的工艺条件。主要是:有源测量组件、过程配件、过程密封等。工艺条件具体包括:工艺压力、工艺温度、介质的化学性质、磨损和机械影响。
注意:如涉及腐蚀性工艺条件,请选择使用 PTFE 材质外壳的 4120 产品。

1:雷达电磁波极化对测量的影响
什么是极化,电磁波在空间传播时,具有同相但彼此垂直的电矢量
E 和磁矢量 B。波的传播方向垂直于电矢量和磁矢量。极化是电磁波的一个固有属性是指电磁波的电矢量 E
的方向轨迹曲线,它的振动方向称为极化方向,这是微波偏振的特性。线性极化方向是由雷达产品的微波模块信号耦合器方向决定的。线性极化具有水平或垂直极化,具体取决于天线或天线的相对方向。工业雷达物位/液位变送器常见的线性极化,它可最大限度地减少过程容器内部结构的虚假回波的影响,这些虚假回波可以从探头、罐内焊缝或搅拌器和挡板反射出来。
雷达产品表现出的线性极化,在雷达物/液位测量中非常重要。在某些应用中通过在连接法兰或凸台上旋转雷达,可以显着降低容器内假回波的影响。如果金属或高介电物体与极化微波的电矢量定向在同一平面上,雷达液位变送器将接收到大幅度回波。如果同一物体与电矢量平面成直角定向,则接收到的回波将具有较小的振幅,如图所示:

注意:当外壳旋转时,偏振方向会发生变化,从而避免虚假回波对测量值的干挠。在雷达产品安装或进行更改时,请记住这一点:
1)雷达发射天线极化 E 的方向角遇到平面障碍物和垂直柱时,会引起巨大的杂散反射,这些障碍物会产生较大的雷达回波信号,而当雷达发射天线极化 E 的方向角遇到在圆形障碍物时,表面上的散射回波只是小振幅的虚假信号。
2)为了减少杂散反射,首先通过旋转雷达产品获得最佳的回波信号(最低虚假回波幅度),然后创建虚假回波曲线。
2:雷达电磁波衍射对测量的影响
通常我们关注雷达产品的波束角(它与雷达天线有关)。这可能会给人一种印象:
即雷达天线可以将电磁波全部聚焦在这个波束内指向一个方向。但事实并非如此,实际上尽管天线被设计为产生定向波束,但天线还会向各个方向辐射一些能量,除了大部分辐射功率在主瓣上外,还有较弱的能量辐射到其他波瓣上。这种现象是由衍射引起的。因此如果雷达产品安装在靠近罐壁或其他罐体障碍物的地方,测量回波信号中就会出现噪声问题。
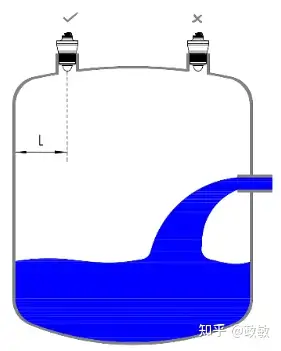
3:安装位置离罐壁最小距离
4120 产品安装点距罐壁的最小距离(L)需要大于 20cm,安装点推荐距离值为罐体半径的 1/2。
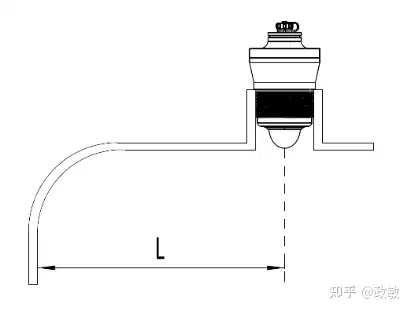
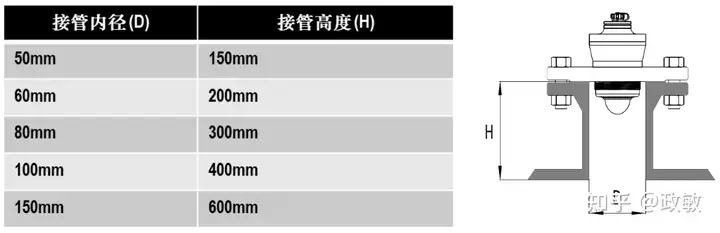
4:接管(喷嘴)长度要求
为了使雷达波能不受干扰地传播,接管(喷嘴)尺寸应保持在下表中给出的指定范围内。接管内部需光滑,避免焊接不良、生锈或沉积物
安装注意事项
在安装变送器之前,请遵循以下安装位置的建议。
1. 安装位置选择
雷达变送器在寻找合适的安装位置时,须仔细考察一下储罐的状况,安装ANL/AiW-4120 变送器产品时,请考虑以下准则:
• 变送器应安装在储罐顶表面,罐内下部空间清晰畅通,这样可获得最佳的测量性能。
• 变送器应尽可能少地安装在紧靠着储罐壁的位置。
• 请勿将变送器安装在储罐/水箱中央。
• 请勿安装在储罐的入口流附近或上方。
• 请勿将变送器安装在井盖上。
• 请勿将变送器直接放置在侧井门上方。
• 多个 4120 变送器可以在同一罐上使用,雷达信号互不干扰。
2. 计算天线波束角度投射宽度
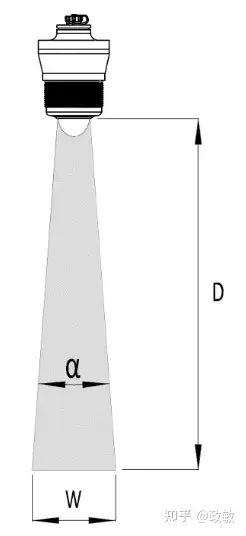
雷达变送器天线波束照射的罐内底部区域内,应尽可能少有其他罐内结构:梁、管道、焊缝等。
标准规范要求的安装条件是:雷达变送器与罐壁之间的最小距离不小于(W/2),这里 W 是雷达变送器天线波束投射到罐底的照射圆直径。罐体越大投射圆就越大。应根据罐体容器的高度 (D) 进行计算。
ANL/AiW-4120 的天线波束角为 6° (α)
计算雷达变送器天线波束角在不同高度的罐体容器底部的辐射宽度,可按以下计算公式近似计算:W = π x α x D
如果雷达变送器安装在离容器壁太近的地方,可能会产生强烈的干扰信号。同样沉积物、铆钉或焊接接头也会产生干扰信号,它们的回波会叠加在物料真实的回波上。因此,雷达变送器安装位置与罐壁之间必须保持足够的距离。
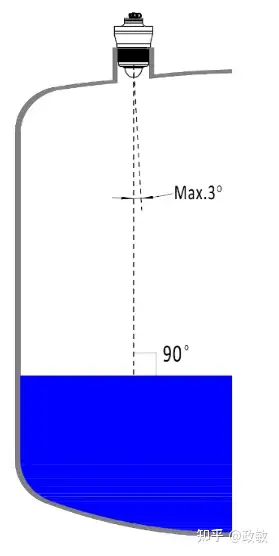
3. 水平倾角和方位朝向调整
ANL/AiW-4120
雷达变送器应垂直安装,以确保产品表面有良好的回波,建议最大倾斜度为
3°,要注意检查法兰接管面是否水平,不够水平时需要采取必要措施来调整,这尤其在液体应用中,大高度罐体应用是特别重要,雷达变送器尽可能垂直于液体介质表面,以获得最佳测量结果。在固体应用中,建议将雷达变送器天线波束对准罐体的下料口区域,以获得最佳测量结果。

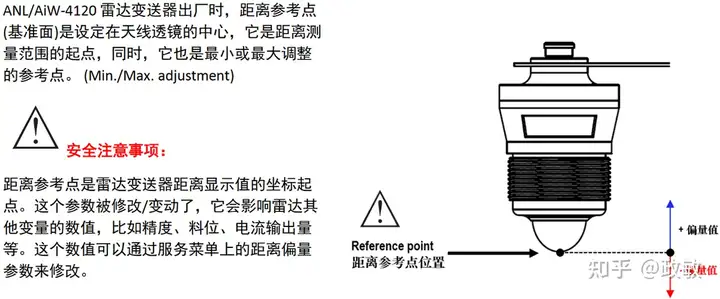
4. 调整距离测量值的参考点(基准面)
5. 安装工况有搅拌器或泡沫
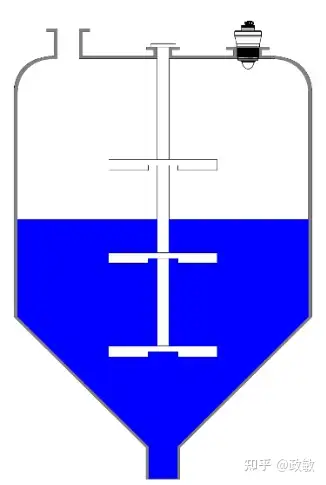
当罐内有搅拌器时,应在搅拌器运动的情况下进行自动假回波抑制。这确保了来自搅拌器不同位置的叶片的干扰反射会一起保存。
罐体容器内中的填充、搅拌和其他过程,可能会在物料介质表面上形成致密的泡沫,这些泡沫会大大抑制发射的信号。如果搅拌产生泡沫或波浪,则应使用特殊的菜单配置参数。请在 ANL/AiW-4120 变送器的菜单项中找到液体/泡沫的参数配置。
如果泡沫导致测量误差,我们建议您使用尽可能大的雷达天线或性能更强的雷达产品规格,例如 ANL-4120MP60 规格雷达或选择其他CHINASIMBA 的大型过程控制工业雷达产品系列。
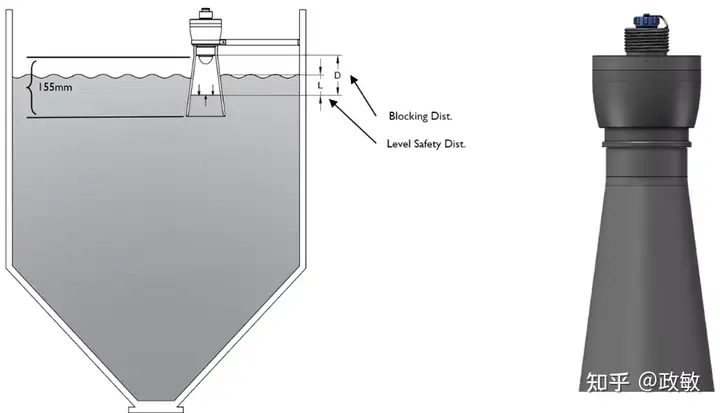
6. 带防溢罩(选配功能)的安装
带防溢功能规格的 AiW-4120 产品配有防溢罩,它具有防物料外溢,能够实时检测液位达到罐容器最顶部情况并触发报警,这通常称为溢流能力。这功能对于防止具有高度腐蚀性、有毒或其他危险的介质的泄漏至关重要。
如果 AiW-4120 雷达产品配置了溢出功能,罐内液位的阻挡距离通常为 140mm(D),雷达会计算估计出液位上升速度和液位报警安全距离(可配置)。请在 AiW-4120 雷达变送器产品的菜单项中找到 Overfill 的参数配置。
| 产品文档下载 | MKU-AiW4120MPMCMK_雷达液位计操作手册_DY0723 |
 正在下载,请等待……
正在下载,请等待……







楼主最近还看过

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
