PID整定的复杂性 点击:163 | 回复:0

使用PI两参数控制,如果是自衡对象积分时间固定;
用固定的公式进行整定,而且公式和控制系统无关;
使用一阶纯滞后控制模型描述自衡和积分对象;
将系统辨识用时域上的响应曲线画图代替。
应该说通过这些创新,降低了工程整定的难度。但是在实际工作中进行整定还是一件非常复杂的事情。这也是现代流程工业仍然大量使用PID控制的一个原因。现代工业的特点是流程长、工艺复杂、循环物料多、热耦合严重。随着控制资产价格的大幅度降低,现代工业生产越来越依赖于高度集成的控制系统。耦合不一定是有害的。但是耦合增加了控制方案设计和PID整定的复杂性。
我们用冷水和热水控制水温和水量的2×2系统说明问题的复杂性。具体控制方案如下:
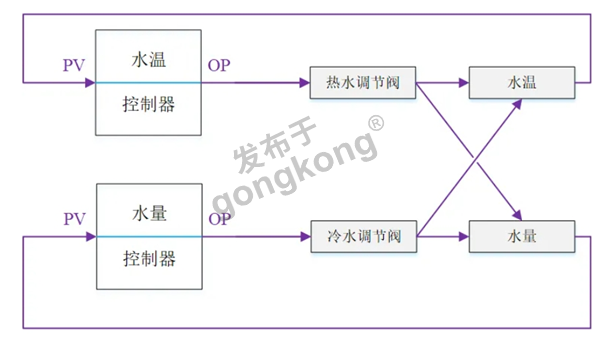
外界工艺干扰。冷热水温度的不稳定会增加系统的扰动;
自身非线性。调节阀非线性会增加系统的不确定性;
不同水量的情况下,单位热水调节阀的变化引起的水温变化增益会变化。水量是10和水量是100,被控对象模型增益也会差10倍;为什么?
水量控制回路不投自动,水温被控对象的模型增益更小更快。水量控制回路投自动,水温模型增益会变大,而且增益变化和比值和负荷都有关系。不仅如此,水温模型的动态响应过程会变长;为什么?
多变量的耦合影响有时候会被强化利用,有时候必须被减小分离。PID整定的基本原则可能显著不同。
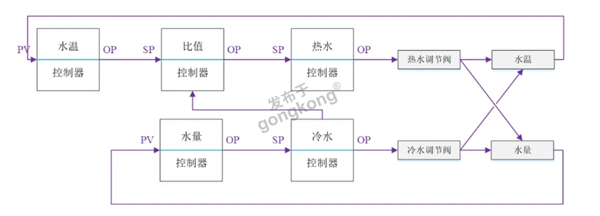
如果使用下面的更复杂控制方案能解决一些问题。虽然系统更复杂,但是还可能出现其他问题。例如冷热水水温波动怎么办?如果阀门饱和怎么办?设备异常剩余回路如何工作?个别回路不能自动带来的不确定性如何处理?这些都增加了控制方案设计的艺术性和PID整定的难度。只有最合适的控制方案没有最优的控制方案,这也是为什么控制方案设计原则是至简至优的原因。
要挖掘问题的复杂性的深度,但是设计方案要尽量简单。要对问题的复杂性有清醒的认识,进行方案设计和PID参数整定时一定要有系统思维。PID参数整定其实是有顺序和优先级的。一定不能孤立的看待单回路PID整定,这也是自整定软件始终没有在流程工业推广起来的原因。
来源:微信号 互侃PID
该作品已获作者授权,未经许可,禁止任何个人及第三方转载。





楼主最近还看过

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
