怎么查看ABB机器人关节减速比 点击:550 | 回复:0

发表于:2024-01-30 16:13:29
楼主
在robotware6.03及以前版本,可以通过示教器的配置-motion-transmission查看本体各关节的减速比。
之后版本,示教器屏蔽了该功能。
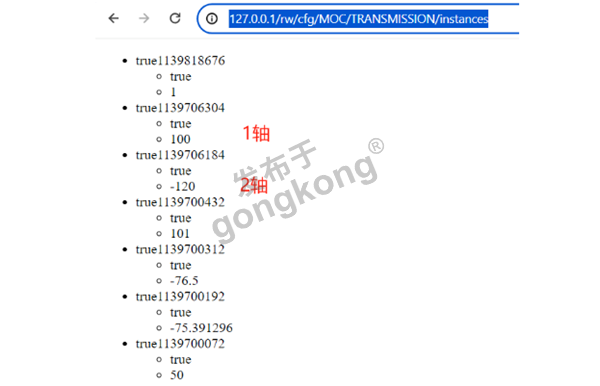
robotware6.x版本的机器人,均可以通过网页,查看本体各轴减速比。
打开网页,输入以下地址:http://127.0.0.1/rw/cfg/MOC/TRANSMISSION/instances
(ip地址根据实际修改)。下图为IRB120机器人的减速比。
针对robotware7机器人,可以使用postman进行测试,具体路径参考robotwebservice2.0相关介绍。





楼主最近还看过
热门招聘
相关主题

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
