解决方案 | 3D视觉引导活塞杆正反抓取 点击:65 | 回复:0

活塞杆是一种常见的机械零部件,广泛应用于液压系统、汽车发动机、工程机械等领域。它起到连接和传递力量的作用,具有重要的功能。然而,由于活塞杆的形状与姿态各异,在进行机械抓取时容易发生误差,导致产品质量下降或生产效率降低。传统的机器视觉系统对于这种复杂形状的识别和抓取存在一定困难,这给机器人操作带来了一定的挑战,需要寻找一种更精确的抓取解决方案。
基于大量的客户需求和项目实践,富唯智能在轴棒类工件正反抓取、上下料场景积累了丰富的技术、方案、应用经验。通过AI+3D技术实现活塞杆正反抓取,点云识别效果好,帮助客户提高生产效率和质量,实现柔性生产。
3D视觉引导活塞杆正反抓取

项目难点:
活塞杆的正反抓取所面临的难点主要有两个方面:形状复杂性和姿态不确定性。活塞杆通常具有曲线、异形等复杂形状,传统的图像处理方法很难准确地提取特征信息。而且,由于活塞杆在生产过程中可能处于各种旋转、倾斜和变形的姿态,传统的定位方法也无法满足需求。

解决方案:
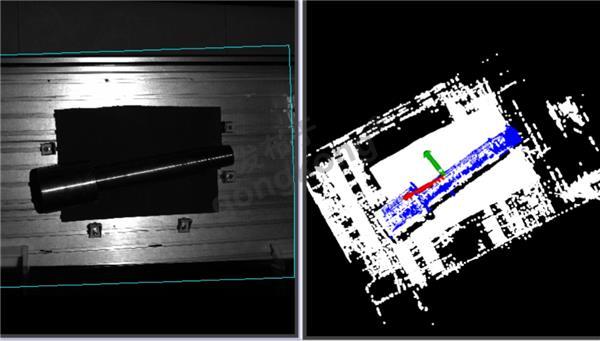
使用机器人和3D视觉系统的方案,可以引导机器人准确抓取物料中的轴体工件,并放置于指定位置完成上料操作,不仅可以提高生产效率还能减轻工人的负担。

方案优势
1、高精度:采用大视野相机,可对大型轴体进行高精度3D微子识别。
2、稳定性强:通过使用自主研发视觉算法分析模型,能有效应对大型工件可识别面积小、点云稀少的问题。
3、适应性高:通过轨迹规划算法和防碰撞处理,可以适应各种中大型零件的无序抓取需求,定位放置位姿,引导无碰撞准确下料。
4、提高生产效率:在车间流水线作业区进行自动化上下料,替代人工劳作,可以降低人工成本,提升企业生产效率。
3D视觉引导活塞杆正反抓取技术的出现,为解决传统抓取方法难以准确判断活塞杆正反方向的问题提供了新的解决方案。这一技术具有较高的准确性、适应性和自动化程度,为机器人操作带来了全新的可能性。未来,随着技术的不断发展和应用场景的扩大,3D视觉引导技术将在工业自动化领域发挥更大的作用。






官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
