【KEWEI】科威经济型LP3系列可编程控制器使用说明 点击:665 | 回复:1

发表于:2023-08-02 17:46:17
楼主
一、扩展模块应用手册
LP3系列PLC是以 PLCOpen 为背景进行的模块化研发,以梯形图为编程语言,以指令的形式进行编程的。这些指令的应用适用于大多数非数控类的运动系统。
1、运动系统类型
(1、1)运动控制系统简述
运动控制系统是以电动机及其拖动的机械设备为控制对象,控制器为核心,电力电子功率变换装置为执行机构,组成的电气传动系统。这类系统通过对电机的转矩、转速和转角的控制,将电能转化为机械能,实现机械的各种运动要求,如定位、调速、随动等。
运动控制系统基本组成部分包括:控制器、功率驱动装置和电动机。

(1、2)运动控制系统类型
运动控制系统含括以下两种:
轨迹规划型:以工件为对象,进行轨迹和形状加工。标准数控(如数控机床通用加工设备)和开放式的非标数控(如线切割、行业机械手等专业加工设备)属于该类型,其外接信号少。
工位型:在生产线上,依据前后设备状态和周边信号状况,以同步、定长等方式实现控制,满足工艺要求,通常要求效率高。如印刷同步(同频同相),定长裁切(含追剪、滚切)。
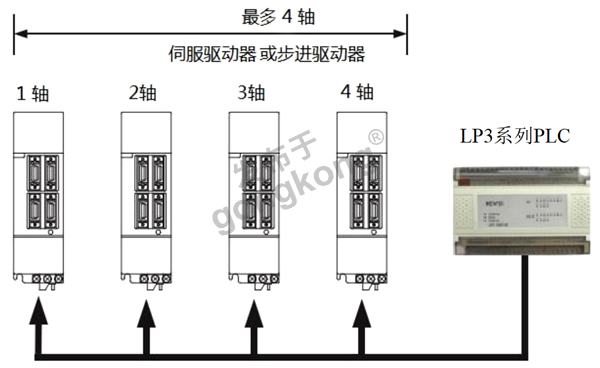
本书介绍的LP3系列PLC运动控制是工位型的,主要是输出脉冲信号给伺服驱动器或步进驱动器,从而满足机械设备的工艺控制要求。
2、LP3系列PLC运动功能简介
采用梯形图语言编程,以轴指令和轴参数方式向伺服驱动器、步进驱动器等功率驱动装置输出脉冲(最多四路)信号,完成定位控制。以脉冲频率控制对象的移动速度,脉冲数控制对象的移动量。单轴脉冲频率最高 100KHz,四轴同时运行各轴频率可达 100KHz。
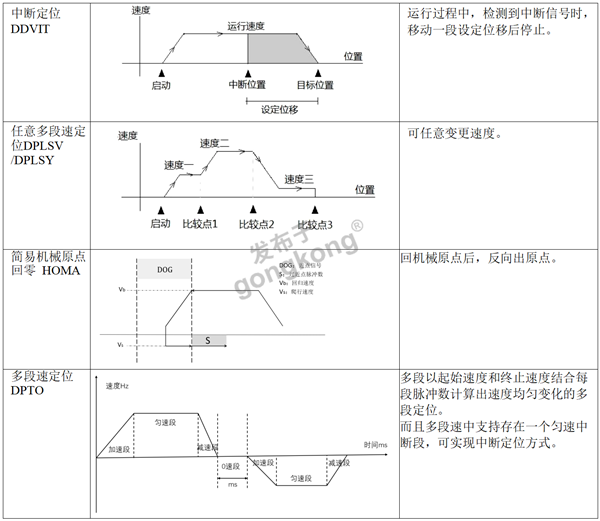
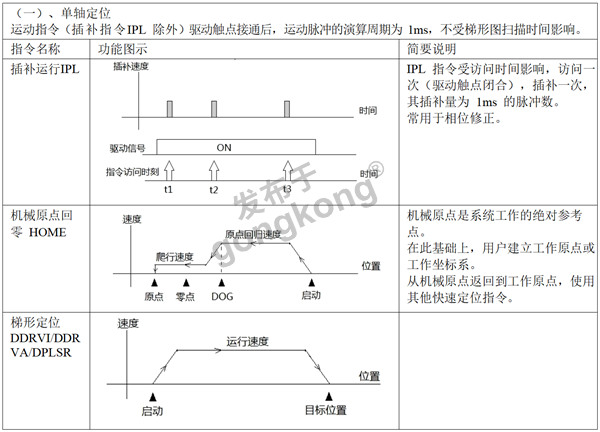
(2、1)单轴定位
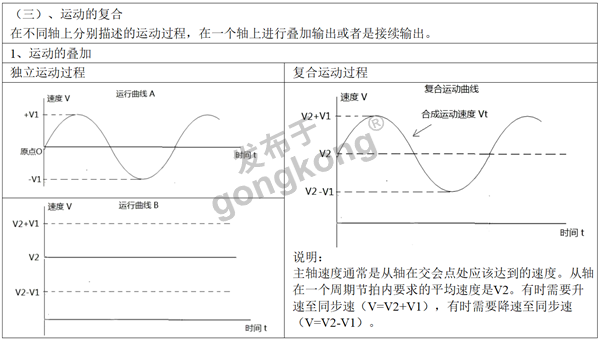
(2、2)运动的复合

.jpg")
.jpg")





楼主最近还看过
热门招聘
相关主题

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
