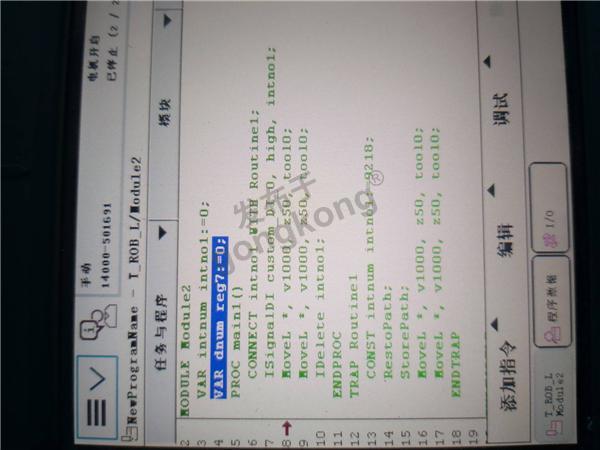
关于中断指令问题 点击:611 | 回复:6






楼主最近还看过
热门招聘
相关主题
- 我有IAI-RCP2电缸之PLC脉冲控...
 [4092]
[4092] - 终于弄了一个好看一点的布局...[1979]
- 无示教器时应当如何使用发那...[1261]
- 做移动机器人控制,选择哪款工...[821]
- RobotStudio 官网英文视频教...[1239]
- 哪里有ABB机器人培训[1240]
- 小型四轴机器人DENSOLPH四轴...[1119]
- Delta2机器人——施耐德ELAU包...[1789]
- 工业机器人设计图[5795]
- ABB机器人仿真软件ABB Robot...[12346]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
