机器人末端的快换装置,有哪些设计要点? 点击:1663 | 回复:1

罗罗,我常常在一些机器人末端上,看到有快换装置的应用。
你能说说,快换装置是怎么回事吗?
可以。
你说的机器人应用,是属于自动化范畴的。
那种快换装置(Quick Changer/Tool Changer),分为两侧,主侧和副侧。
主侧装在机器人末端,副侧装在工具端。
副侧常常和工具固连,放在工具架上,一个工具用一个副侧。
机器人末端,会根据工艺需要,自动更换不同的工具(执行器),来协同机器人运动轴,完成不同的动作,处理不同的物料等。
嗯哼,我大体明白了。
其实,在做三坐标测量机时,有一段时间,我的主要工作内容,就是快换装置的设计。
你们为什么要用快换装置?
因为当时,采取了一个Z轴的配置,根据不同的应用,用快换装置,自动更换不同的检测头。
怎么更换的?能显示得具体一些吗?
好的,我做了一个PPT,名叫《测头更换流程》。
在公号罗罗日记里,回复测头,即可下载播放,观看测头更换的流程。
好的,我晚点去看看。
不过,我想问,为何只配置一个Z轴呢?
其实,我们当时有两个方案。
第一种是3只Z轴:一个探针Z1轴,一只二维光学镜头和一只三维光学镜头Z2轴,另外一个Z3轴,留给粗糙度检测镜头,或者激光干涉仪。
此配置方案的优点是测头固定,没有因为更换测头,引入的重复性误差。
缺点是测头都挂在Z轴,导致重量变大,对运动速度有不利的影响,对结构刚性要求高。
而且检测的时候,旁边的测头会在一定程度上,影响检测头的检测范围,测量深度等。
那么,第二种配置呢?
只有一个Z轴。
根据需要,快速更换检测头,其他检测头不用时,放置于测头架上。
比如,三维共聚焦光学检测头,二维光学检测头,探针测头,激光干涉仪等轮换到Z轴上。
此配置方案的优点是重量轻,可以实现高速运动,缺点是需要更换测头,精度依赖于更换时的重复定位精度和校调。
你们为何用第二种方案?
最主要的是第一种太重了,想要达到需要的精度,结构设计非常有挑战。
事实上,我们没做到。(更多内容,可以参考《记三坐标测量机设计经历》)
另外,我们考察CMM三家主要竞争对手,海克斯康、蔡司、三丰的设计,他们Z上大部分只有一个轴。
可以说,快速更换,是行业里的一个发展趋势。
所以,我们最后决定用第二种方案。
好的,明白。
但是,你们为什么不买现成的快换产品呢?
因为市场上现有的产品,不满足我们的使用要求。
最重要的是,我们有一个很特别的要求:希望装置是中空的结构。
因为,中间我们要放置相机和光学器件,这个完全没有产品满足要求。
另外,电接口和气接口数量,不满足我们的应用要求。
我们希望总重量小于2Kg,这一点,到是有不少的供应商可以做到。
但是,我们电接口数量多达60,没有一家供应商可以达到。
而且,问了几家供应商,都不愿意定做,毕竟我们需要的数量太少,可能他们觉得没啥钱赚,投入精力不划算吧。
OK。你们研究的,比较知名的供应商有哪些?
ATI, Schunk(雄克),Applied Robotics,KOSMEK(考世美),Gimatic等。
我有2张表格,如下图,从原理和参数方面,对比了几家供应商。
同时,也对比了几家竞争对手,快换装置的做法。

快换装置原理对比

快换装置参数对比
竞争对手快换装置对比
通过上面的原理对比,你应该能够看出。
我们主要考虑:重复性,定位,预载,安全锁紧,释放,电接口数量,气动接口,载荷等设计要点。
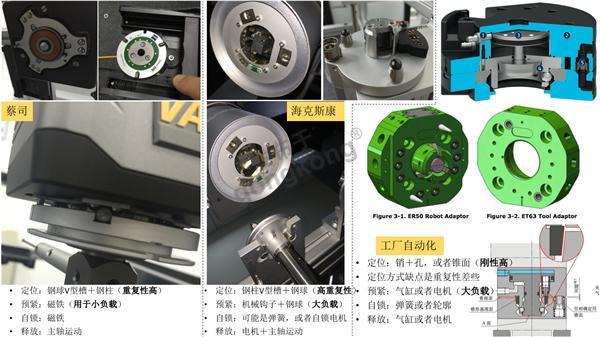
定位:竞争对手是V型槽和高硬度钢球定位。
当V型槽由两个钢球构成时,另一边则是一根钢棒,当V型槽是两根钢棒构成时,另一边则是钢球。
大量的论文研究表明,这种定位方法,在动态耦合时,重复性是最好的。
比如《Kinematic couplings: A review of design principles and applications》中有提到,可以达到0.01um的重复性。(更多相关文章可以参考http://pergatory.mit.edu/kinematiccouplings/html/documents.html)
但是因为是点接触,所以刚性不是很高,一般用于轻载荷,低加速度。
而自动化方面的供应商,定位方式有所不同。
在XY方向,他们大都是定位销和定位孔定位。
当然也有用锥面定位的,比如KOSMEK(考世美),这种浮动锥面定位,优点是可以显著提高重复性。
从上面参数对比表,可以看出,只有考世美实现的重复性是最高的,达到3um。
而对于Z方向定位,都是用接触大面定位。
工厂自动化方面的定位方式,好处是,接触面大,刚性好,但是缺点就是重复性差一些。
预载:预载荷的大小,在很大程度上,决定了动态耦合的刚性,预载的加载方式,可能会带来冲击,应当避免冲击。
我们中途有提到用薄型气缸,后来就是因为冲击被否决了。
安全锁紧:就是系统突然断电断气时,工具侧不能掉下来,应该是锁住的状态,不然会出现安全等问题。
释放:释放和预载是相反的,简单理解就是解除连接。
电接口:共60针,摆放在外侧,便于维护。
气接口:除了用于气缸,另外预留2路气体,作为气体冷却备用。
载荷:6Kg,重心位置不超过结合面200mm。
既然没有满足要求的设计,那你们只有自己做了?
没错。
因为我们载荷比较大,同时重复性要求高(X,Y:±50um,Z±15um,中心轴±0.25°)。
所以,我们参考海克斯康,机械钩子式快换装置,做出了第一个版本的设计。
原理如下图。
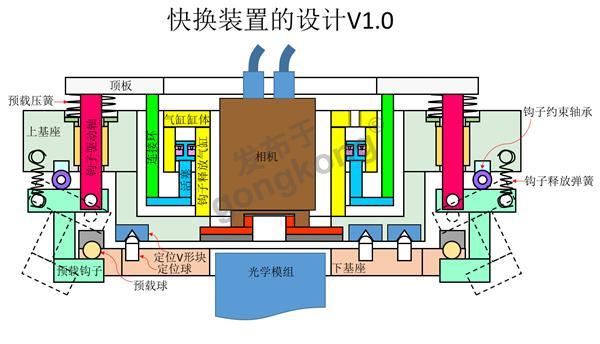
用钢球和V型槽定位,压簧做预载,用机械钩子,来钩住被连接的副侧模组。
这里,我们用中空的气缸来释放,因为中间的位置,被相机和光学模组占用了。
中空的气缸是自己做的吗?
是的,当时倒角太小,密封圈的装配还挺费劲,抹了润滑油,还用热水烫了一下,才压进去。
后来你们做测试没有,效果如何?
对于上面的设计V1.0,后面我有测试其重复性和静态刚性(因为实验条件有限,没有做动态刚性测试)。
测试方法是:
(1)重复性
利用现有的Z运动平台,把快换装置装在平台上。
相机和主侧模组在一起,挂在平台上。
通过马达微调到想要的位置后,用机械锁紧Z轴,避免电机位置变化引入误差。
同时,在快换装置的下侧,竖立两块板,当气缸通断气的时候,实现释放和预载,释放后,光学测量模组,可以落在竖立的两块板上(板顶部贴有缓冲橡胶)。
预载后,通过相机拍照,看位于其正下方的标准校准玻璃,分析图像在XY方向的移动量,来测量XY的重复性。
因为是2D光学检测系统,所以Z的重复性,直接用千分表打光学模组的上表面。
测试结果是:XY方向重复性±48um<±50um,Z方向±10um<要求±15um。达标。同时,因为相机有清晰的成像,所以中心轴倾斜也没问题。
(2)静态刚性的测试
直接加载一组力,力的作用线,通过耦合后模组的质心,然后还是看相机图像在XY方向的平移量。
因为项目要求的是动态刚性(0.1um),所以这里测试的静态刚性,只能作为参考。
刚性测试结果是,波动幅度最大到250um/gf。
对于动态刚性,暂时先通过CAE模拟,来分析其动态刚性。
后面通过做瞬态分析,发现刚性不是很好。
因为检测末端点,在运动“稳定”后,相对于工件的位移变化,已经达到10um。
结论是系统刚性不足,各个模块,特别是快换装置,都必须继续提高刚性。
所以,你们后面有继续更新设计,对吗?
是的。
其实,对于上面的概念,我们在CAE结果还没出来时,就做了一些局部的更新。
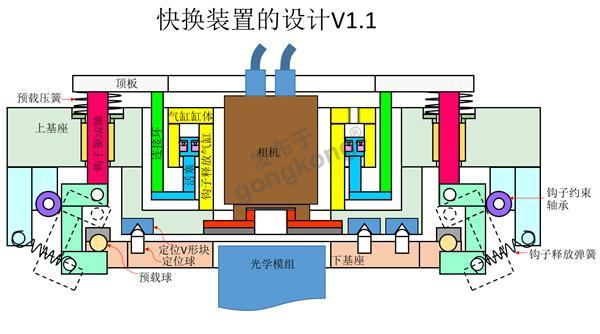
从V1.0更新到V1.1。
主要是把钩子约束轴承,变换了位置,因为V1.0中,钩子是旋转到水平位置,可能有水平分力。
V1.1中,因为约束在侧面,当调整好约束轴承位置后,钩子是直线往上走,没有水平分力。
后来有继续升级设计吗?
有的。
因为V1版本的结构件挺多的,显得不够简单。
另外,没有经过长期的测试,气缸可靠性可能是一个问题。
所以,后来做了一个新的版本,V2.0。
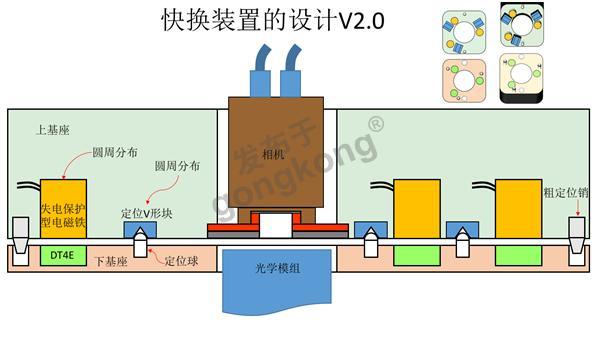
这个版本,最主要的改变,是把气缸预载,换成失电保护电磁铁预载(关于失电保护电磁铁,可以参阅《5个来自欧美的优质电磁铁供应商,再也不怕选不到合适的电磁铁了》)。
因为,电磁铁比自己做的气缸稳定可靠。
嗯,明白。
那你这个概念,其实,还是没有提高快换装置的刚性,对吗?
没错。
所以,后面又升级到V2.1。
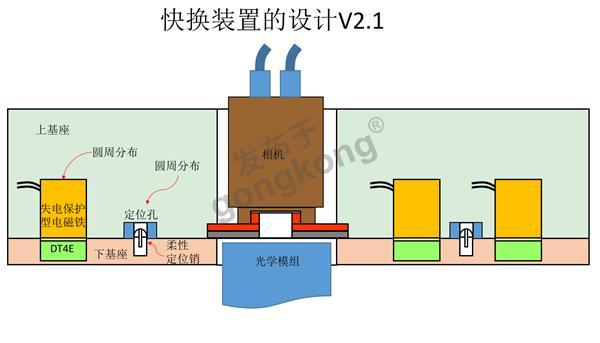
主要的考虑因素,就是提高刚性。
这里把原来的钢球加V型钢柱定位方式,变成了XY方向用柔性定位销,Z方向用大面接触。
这种做法,会损失一定的重复性吧?
是的。
正如前面所说,钢球加V型槽的动态耦合,能够达到的重复性是最高的。
但是,我们升级到V2.1,其实也是有原因的。
因为这种概念,能够达到的重复性还是相当高的。
其实,我们是参考了总部位于瑞士,主要用于工件装甲的System 3R的做法。

System 3R:X,Y方向,由四组柔性弹片,配合高硬度凸台来定位,之所以用柔性体,是为了避免Z方向的过约束,因为Z方向,是用四个面接触来定位。
目前,V2.1这个方案,正在等待物料,后续会有一些测试。
好的,希望以后能有一些测试结果。
我会跟踪的,有结果,我会写在这篇文章的评论里,欢迎你关注。
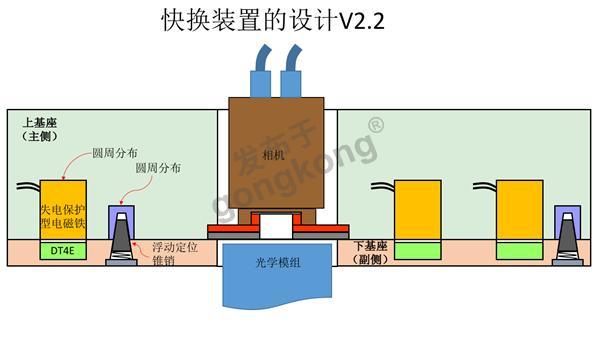
对了,后来,我自己又参考考世美的做法,做了一个版本,V2.2。
主要是把XY的定位方式,换成浮动锥销。
当然,这个版本没有出设计,我自己留个底,可能以后用得着。
我懂。
我还有一点疑问,电磁铁和相机,都会产生热量吧,对精度有影响吧?
当然,因为后面V2的方案都引入了电磁铁,电磁铁会引入一个热功率,瞬间功率高达25瓦。
不过,因为用的时间很少,大概只有5/1000,所以实际的热功率很小,只有零点几瓦。
到是相机本身会发热,最后的散热设计,是需要重点考虑的问题。
不过,我们还是有解决办法的。
对于相机,采用封闭包围的散热片,加上外接的空气,来冷却它。
前两天测试了一下,效果还是很明显的,可以降低相机温度15度,从原来的43度,降低到28度。
不过对系统精度的贡献,还需要做更多的测试。
还有,你们的60针电接口是怎么解决的?
用的Pogo Pin,我们提要求,找供应商做的。
因为,没有现成的模块有那么多针脚,同时,有些模拟信号需要做屏蔽保护。
同时,还考虑了Pogo Pin的接触力,因为这会降低电磁铁的预载力。
当然,对于电磁铁和针脚式电接口,我们也做了隔热处理。
采用隔热板,隔热陶瓷等,有效隔离其热源。
好的。
罗罗,最后,我还有一个要求,你上面的原理,参数对比,以及不同的设计版本PPT,能分享给我吗?
可以。
在我公号里,回复“快换装置”即可下载。
好的,多谢你。
没事。
相关阅读:
1.《记三坐标测量机设计经历》http://www.cmiw.cn/thread-993787-1-1.html
2.《5个来自欧美的优质电磁铁供应商,再也不怕选不到合适的电磁铁了》http://www.cmiw.cn/thread-984878-1-1.html
3.《分辨率,定位精度,重复定位精度三者之间有什么关系?》http://www.cmiw.cn/thread-986466-1-1.html






- 分享散热电机吹风和抽风的优...
 [2216]
[2216] - 永宏PLC接收MCGS里手动输入的...[608]
- 玖容:气液增压缸正常卸压步骤...[281]
- 波形弹簧的优势[246]
- 请问这俩编码器用户指令区别...[297]
- 螺杆空压机压力低是什么原因...[406]
- 低温试验箱使用说明书[262]
- X-Ray无损检测设备对铸件行业...[229]
- 通告:工业速派APP和官网正式...[254]
- 氙灯老化试验箱操作技巧与使...[232]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
