二例较有难度的硬件电路设计及电路解析之二 点击:416 | 回复:4

二例较有难度的硬件电路设计及电路解析之二
本文列举的二例电路设计,都是从网上看到的求助帖,现作以文字修改。一例是用继电器、时间定时器等低压控制元件设计的低压电器控制电路,另一例是用集成电路、晶体管等元件设计的电子线路。并对电路工作原理作一解析。望能对电路设计者,特别是初学者有所启示与帮助。如有不妥之处请给予指正,本人深表感谢。
一、 用继电器等硬件设计电路。具体流程图是这样的:
按下启动按钮【双启动按钮】---------(面板上的时间继电器开始计时)下150行程长气缸将底模推进-------下150长气缸到位后上75行程气缸下压---------上75行程气缸下压到位后延时0.5-1秒底下30行程小气缸上升--------底下30行程气缸上升延时0.5-1秒后与75行程气缸同时退回(底下30行程小气缸下降上75行程气缸上升)--------上75行程气缸上升到位后下150行程长气缸将底模退出(这时面板上的时间继电器断电)整个动作完成。
工作中按下急停按钮(急停开关),上75行程气缸要先回到上升状态(初始状态),下150长气缸才能退出。
按下急停按钮(急停开关)后,启动开关是不能工作的。
现已已经设计出了最简洁最成熟的控制方式,控制元件有,一个总电源开关,4个磁性开关,150长气缸一个,75气缸2个,30小气缸一个,三个中间继电器,两个时间继电器,一个面板计时器,三个两位五通气动电磁阀,两个启动按钮,一个急停按钮,一个电源,输出=24V.
请画出这最简洁最成熟的控制电路
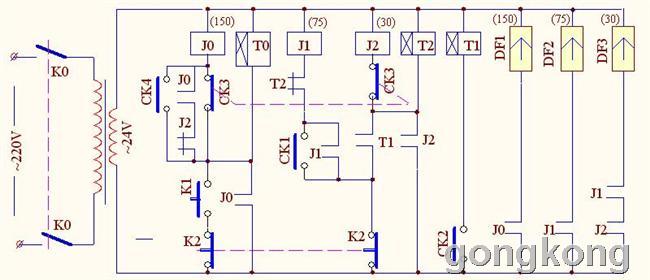
根据题目要求画出如下电路图,可否与原已设计出了最简洁最成熟的控制电路相似:
动作原理:
1、4个磁开关的动作说明:当下150行程长气缸(DF1)位于或退回到原始位时,磁开关CK4常开触点闭合,当下150行程长气缸(DF1)推进到位时,磁开关CK1常开触点闭合。当上75行程气缸(DF2)下压到位时,磁开关CK2常开触点闭合。)、当上75行程气缸(DF2)上升到原始位时使磁开关CK3的常闭触点关开。
2、按一下启动按钮K1,由于此时的K2、J2、CK4这3个开关触点均处于闭合状态,虽然CK3出点处于断开,但继电器J0仍可得电自锁,其触点闭合使下150行程长气缸(DF1)得电,将底模推进,CK4触点断开,同时面板上的时间继电器开始计时。下150长气缸到位后使磁开关CK1闭合,使继电器J1得电吸合,J1触点闭合使上75行程气缸(DF2)得电动作(下压),由于DE2离开原始位置,使CK3触点闭合。上75行程气缸下压到位后使磁开关CK2闭合,使时间继电器T1得电开始延时,延时时间到,使J2得电动作,使底下30行程小气缸(DF3)上升,同时使时间继电器T2得电开始延时,延时时间到,T2动作,其常闭触点断开,使JI失电,J2仍保持吸合。30行程小气缸(DF3)与上75行程气缸(DF2)断电,使二者同时退回(即底下30行程小气缸下降、上75行程气缸上升)。当上75行程气缸上升到原始位时,磁开关CK3动作,CK3触点断开,使J0、J2同时失电,J0的常开触点开在先,J2的常闭触点闭合在后,故使J0 可靠断开。J0的断开使下150行程长气缸(DF1)断电,使其将底模退出(这时面板上的时间继电器断电)当DF1退回原始位时,磁开关CK4闭合,整个动作完成。
3、工作中按下急停按钮(K2),使JI断电,其触点断开使DF2、DF3失电回原位,当上75行程气缸(DF2)上升回到原位使磁开关CK3动作,CK3触点断开,使J0、J2失电断开。J0触点断开使下150行程长气缸(DF1)断电,使其将底模退出(这时面板上的时间继电器断电)整个动作完成。
4、按下急停按钮(K2)使整个动作结束后,如K2不抬起,再按启动开关K1是不能工作的。必须抬起急停按钮(K2),再按启动开关K1,方可重新启动运行。
二、设计一个电路,要求具有如下功能:将该电路的输入端接在一个4~20ma的电流源的输出端。该电路有一控制信号端Kin,Kin端输入信号 =0时,该电路输出与输入电流(原4~20ma的电流源的输出电流)相同,Kin端输入信号 =1(高电平)时,该电路输出电流将由断开前的电流值线性的自动衰减为0.
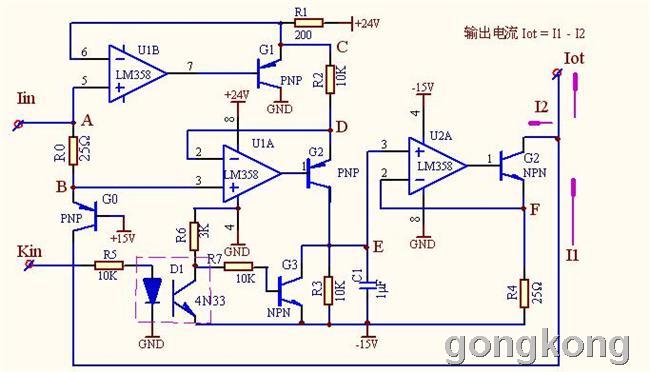
该电路的输入信号Iin为正常的4~20ma电流源,流经25Ω标准电阻R0,R0的下端接PNP型晶体管G0的发射极,G0的基极接+15V电压,G0的集电极与G2管的集电极相连作为本电路的输出端。如4~20ma电流源当输出电流=20ma,其输出端的最大极限电压>18V。故G0管处于跟随器的工作状态:集电极电流与Iin(即发射极电流)相等。R0=25Ω,R0的电压降=0.02×25=0.5V。G0发射结电压降约=0.7V,故B点对地电压=15+0.7=15.7V,A点对地电压=15+0.7+0.5=16.5V,B点比A点电压低UAB(=Iin· R0)。从中可知A点电压<18V,故当输入电流在4~20ma 变化时,R0的电压降(UAB)与输入电流Iin呈线性变化。党外负载=500Ω,输出电流=20ma时,负载电压=10V,而G0管最高可输出15V,有5V压降,足够沿途导线的压降,故仍可远距离输送电流。
运放器U1B与晶体管G1构成电压跟随器,故C点电压Uc≡A点电压UA, 运放器U1A与晶体管G2构成电压跟随器,故D点电压UD≡B点电压UB, ,由此可知:R0的电压≡R1的电压。
运放器U2A与晶体管G2构成电压跟随器,故F点对-15V的电压UF≡E点对-15V的电压UE,由此可知:R3的电压≡R4的电压。由于R2=R3(先不考虑G3管与电容C1的存在)而R2与R3的电流相等(晶体管的集电极电流与发射极电流相等)又可知:R2的电压≡R3的电压。故可推出:R3的电压≡R0的电压. 由于R0=R4,故可知R4的电流≡R0的电流.
R0的电流实为4~20ma即外输入电流(I1),而R4的电流又为G2管的发射极电流,故G2管的集电极电流(I2)与外输入电流(I1)相等。由图推知:电流I2与I1数值相等。但电流方向相反:I1从输出点Iot流出,I2从输出点Iot流入,故输出电流(即I1与I2的和电流)I=0.
上面推出的结论是在没有管G0与电容C1存在的情况下得出的结论,加上这二个元件,电路的输出状态就不是这样了:





楼主最近还看过




 工控网智造工程师好文精选
工控网智造工程师好文精选
