
今天主要介绍DMV-VGR在交换机贴标定定位中的应用,交换机到位后,机器人带着相机,移动拍交换机的位置,另外,标签从脱标机出来后,机器人吸取标签,然后移动到下视觉进行拍照补正,之后就贴到交换机上,完成贴标。
1、设备图片:
2、视觉需求
六轴机械手吸取标签后,需要视觉定位标签位置进行补正。视觉需要定位交换机的位置,并反馈给机械手,完成贴标。一台手臂最多同时贴5种标签。

标签 交换机
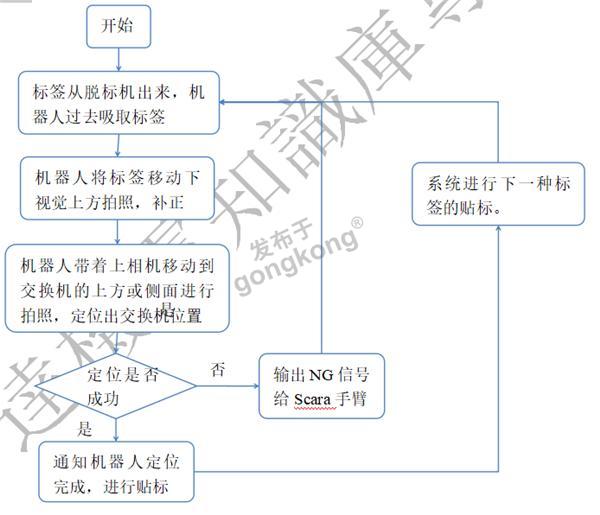
3、工艺流程
4、处理效果说明
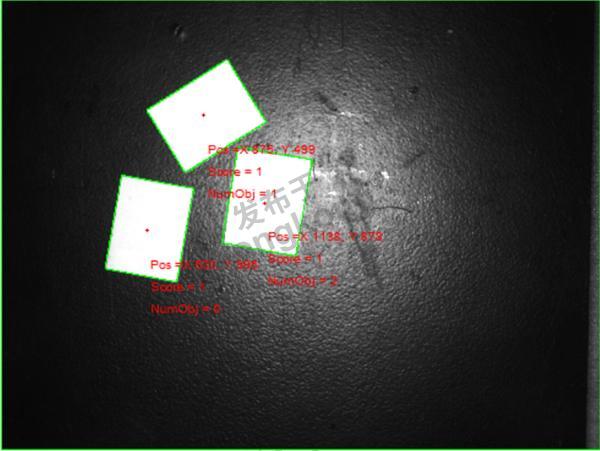
标签(不透明)处理效果:不透明标签的反光较强,用整体轮廓定位
标签(透明)处理效果:透明标签在中间区域才会反光,因此采用部分的轮廓进行定位

![]()
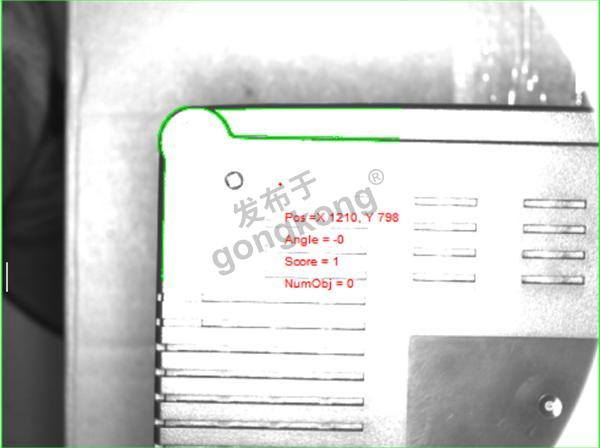
交换机处理效果:通过较强的曝光,将交换机打亮,突显出交换机轮廓后,再进行定位
5、难点和注意事项:
Ø 标签的背景需要黑色不反光,因此吸盘需要发黑处理;
Ø 由于拍交换机的相机是装在机器人上的,光源不能太大,因此拍照的视野较小,只拍交换机的一角,并以此做定位;
Ø 目前使用环形光对交换机底部的进行打光,测量效果是可行的,但侧面的有圆弧边的情况,不一定适用,若后续有类似的产品的,只可能需要针定特定产品重新打光测试。
6、方案特点:
Ø 该方案柔性强,兼容多种标签的贴标,而且交换机顶和侧面都可以贴标签;
Ø 最多可以支持12组不同的标签进行贴签;
Ø 可以极大的缩短开发周期,节约开发成本;
Ø 方案可靠,容易维护和扩展

