
UVW平台
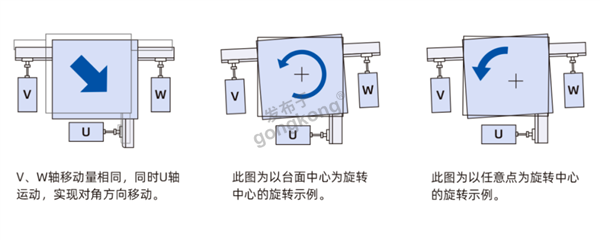
UVW平台(业界亦称XXY或XYR平台)是一种三轴并联式高精度定位模块。三条线性轴(U、V、W)通过铰链或柔性铰链共同驱动上平台,实现了平面内任意方向平移;以任意几何点为旋转中心进行θ旋转;上述运动可单次指令完成,无需叠加机构。
这种设计使得UVW平台在工业自动化中成为一个核心技术,特别适用于需要高精度对位功能的应用场景。
UVW平台的应用场景与优势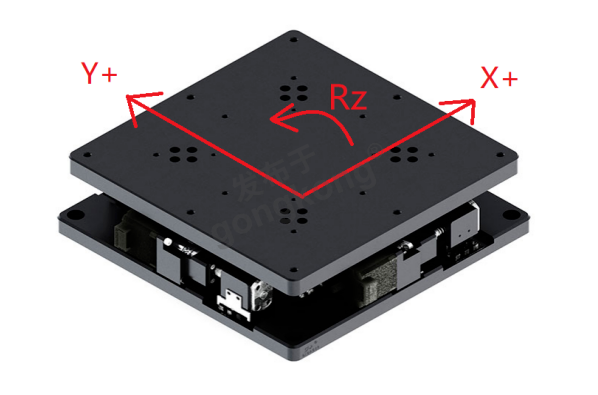
UVW平台与CCD视觉纠偏系统直接耦合,可在单次拍摄周期内完成“拍照→计算→补偿”闭环,重复定位精度稳态≤±1um。相较XYθ叠层平台,优势体现在:
1.旋转中心软件可设:无需机械挪位即可围绕Mark点、焊盘或任意虚拟点旋转。
2.采用绝对坐标系:视觉像素坐标与轴坐标一一对应,省却“旋转中心-相机”二次标定。
3.控制精度提升3成以上,同负载下节拍缩短30–50%。
PPR结构和PRP结构的UVW平台区别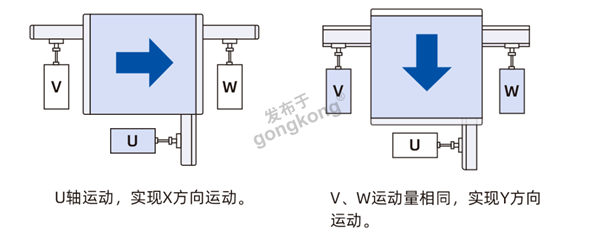
UVW平台的PPR和PRP结构区别主要体现在其构型和应用特点上。
首先,从构型上来看,PPR和PRP结构代表了UVW平台的不同设计方式。这两种结构都是UVW平台的常见形式,但它们在具体的机械布局、运动轴的配置以及关节连接方式等方面可能存在差异。这种差异使得PPR和PRP结构在刚度、稳定性以及精度等方面可能表现出不同的性能。
其次,从应用特点上来看,PPR结构的UVW平台可能更注重于结构的稳定性和精度,适用于对精度要求较高且需要稳定运动的场景。
而PRP结构的UVW平台可能在一些特定的应用场景中具有优势,比如在一些需要更高灵活性或更复杂运动模式的场合。

