回零模式13:
mode=13(注:mode为指令中的参数,具体指令介绍可看往期主题帖)
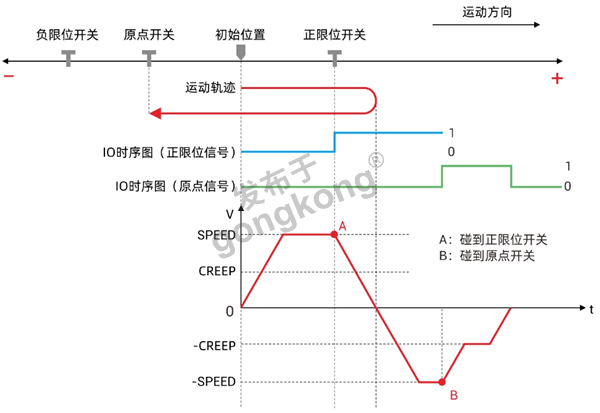
轴先以SPEED正向运行,若碰到限位开关,不会报警停止,以SPEED反向运动,碰到原点开关后减速为CREEP直至离开原点开关立即停止,回零成功,位置清零。若先碰到原点信号,则与模式3相同。

回零模式13:
mode=13(注:mode为指令中的参数,具体指令介绍可看往期主题帖)
轴先以SPEED正向运行,若碰到限位开关,不会报警停止,以SPEED反向运动,碰到原点开关后减速为CREEP直至离开原点开关立即停止,回零成功,位置清零。若先碰到原点信号,则与模式3相同。

