
Profinet转CAN网关模块实现工业机器人通过CAN总线与西门子PLC通信

一、项目背景(Profinet转CAN)
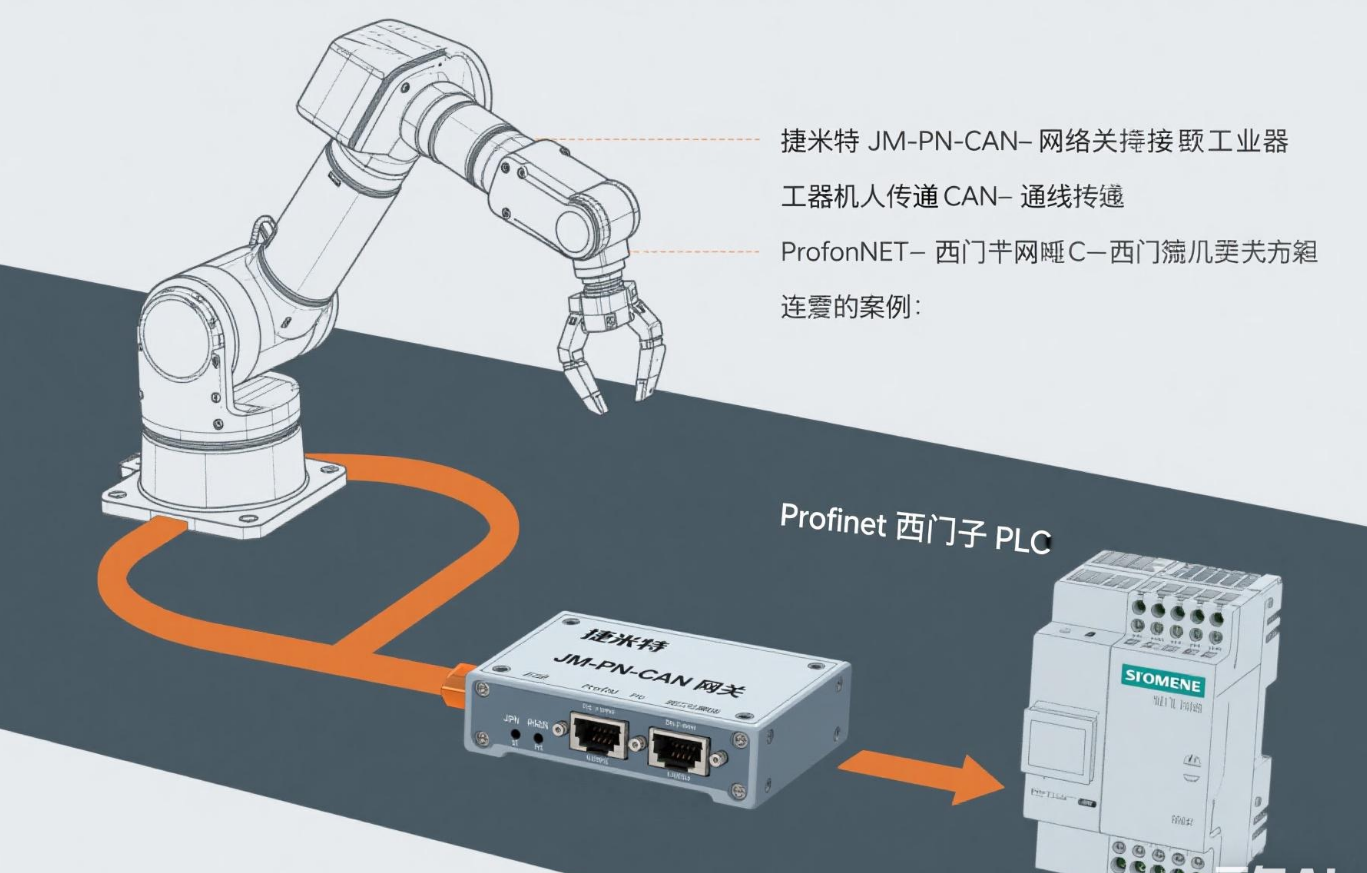
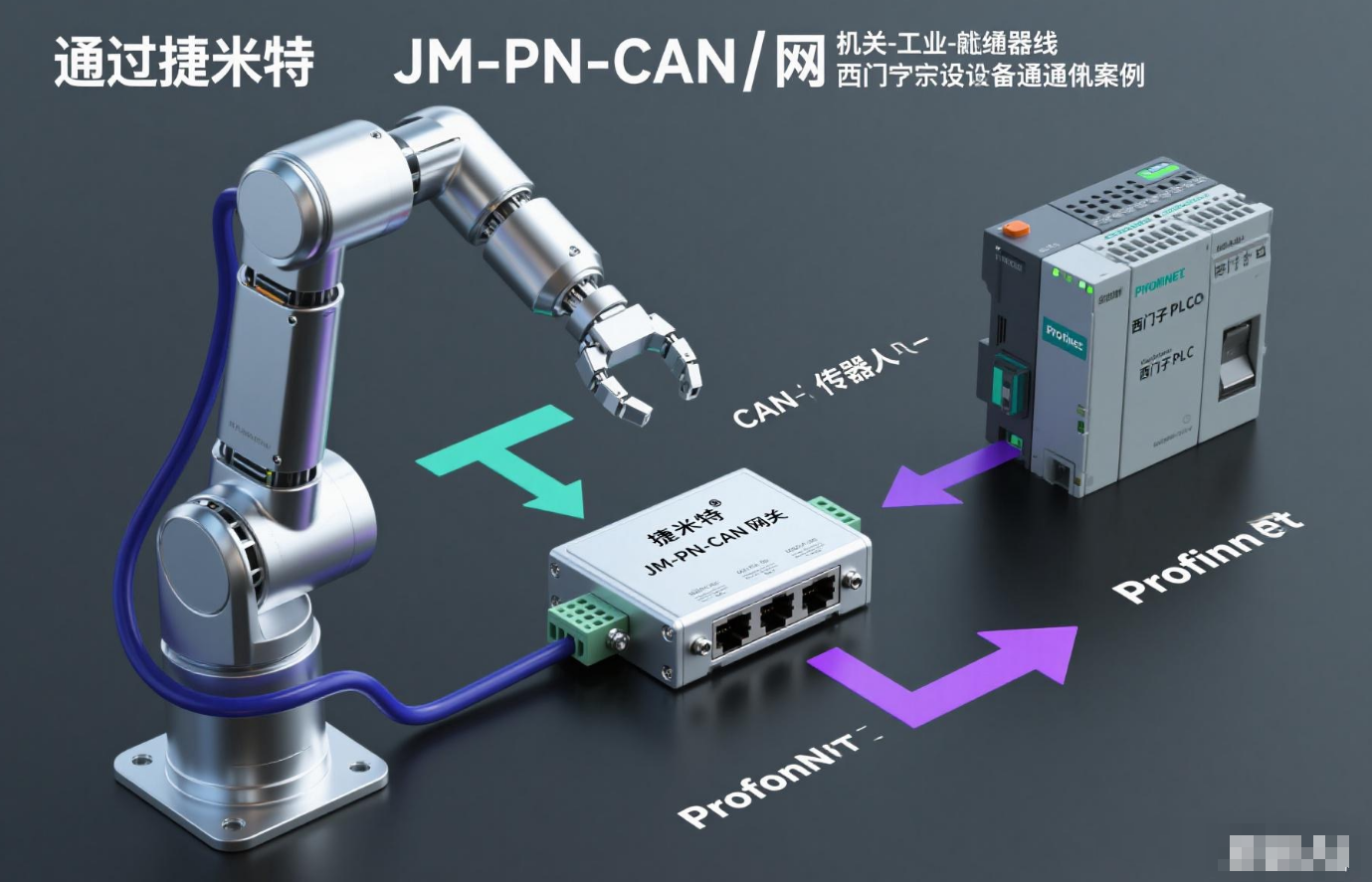
在现代工业自动化领域,工业机器人与控制系统之间的通信至关重要。西门子PLC作为主流的控制系统,支持Profinet协议;而工业机器人的伺服驱动器等设备通常采用CAN总线通信。因此,实现Profinet转CAN的通信成为连接两者的关键。捷米特JM-PN-CAN网关作为一种高效的解决方案,能够实现中控系统(如西门子PLC)与伺服驱动器(支持CAN协议)之间的通讯,确保工业机器人的精确控制和实时响应。
二、系统组成
1.西门子PLC:支持Profinet协议,作为中控系统。
2.工业机器人伺服驱动器:支持CAN协议。
3.捷米特JM-PN-CAN网关:实现Profinet转CAN的功能,连接西门子PLC和伺服驱动器。
设备连接流程图:
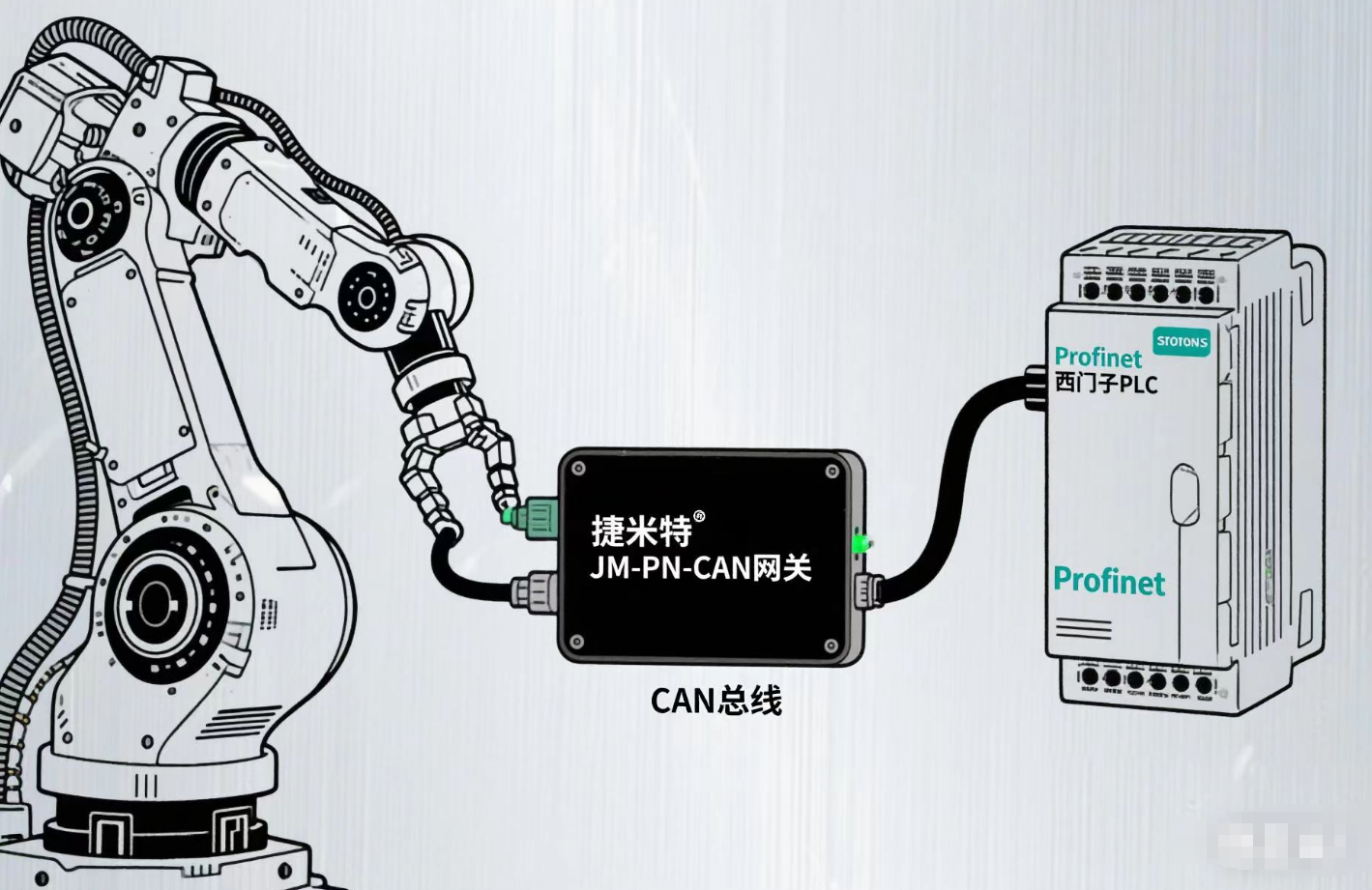
西门子PLC(Profinet)--->捷米特JM-PN-CAN网关(Profinet转CAN)--->工业机器人伺服驱动器(CAN)
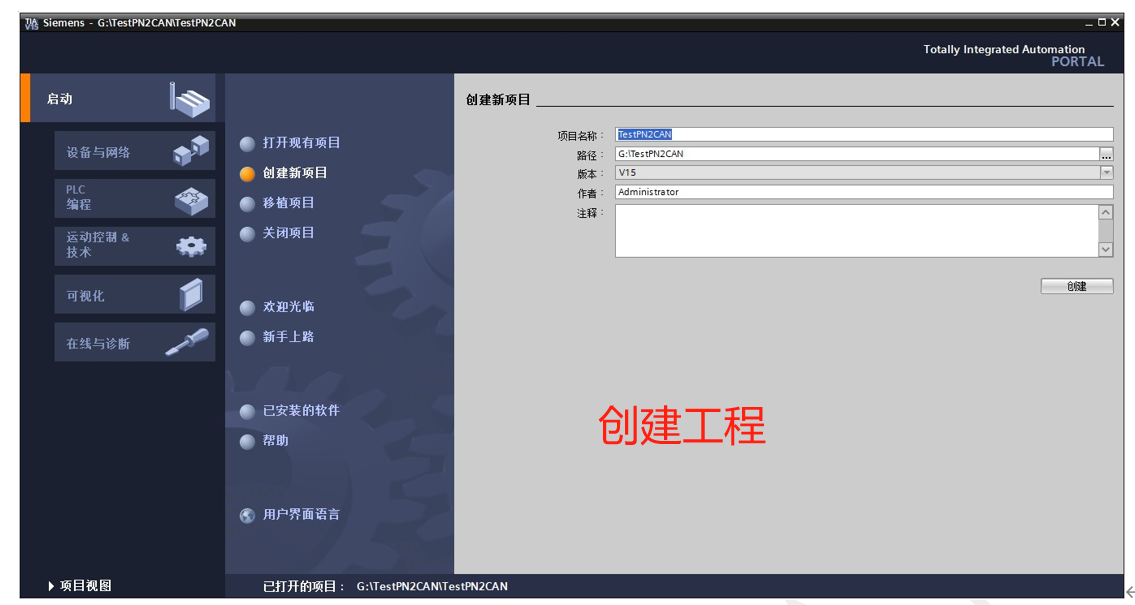
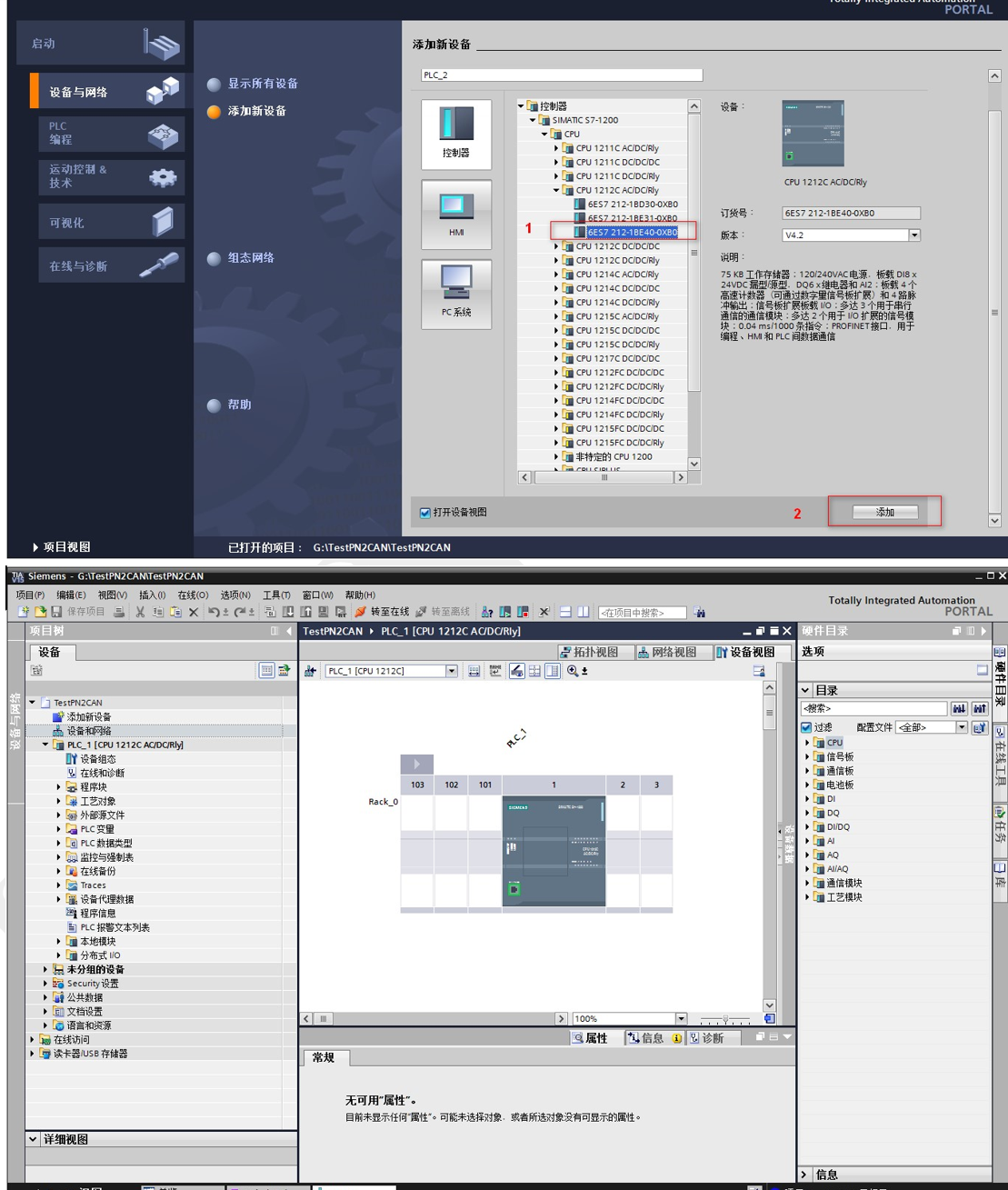
参数设置步骤 4.2.1 创建工程 打开 TIA Portal,选择创建新项目,输入项目名称,选择路径等信息后,点击创建,如下图所示。 通过 Portal 视图或创建完成的项目视图将 CPU 插入到项目中。 在视图中,选择“设备和网络”并单击“添加新设备”(或者在项目视图中的项目名称下,双击“添加新设备”),如下图“添加新设备”对话框,添加支持PROFINET接口的控制器,例如6ES7 212-1BE40-
三、设备连接流程
1.将捷米特JM-PN-CAN网关连接到西门子PLC的Profinet总线中作为从站使用。
2.将网关的另一端连接到工业机器人伺服驱动器的CAN总线中。
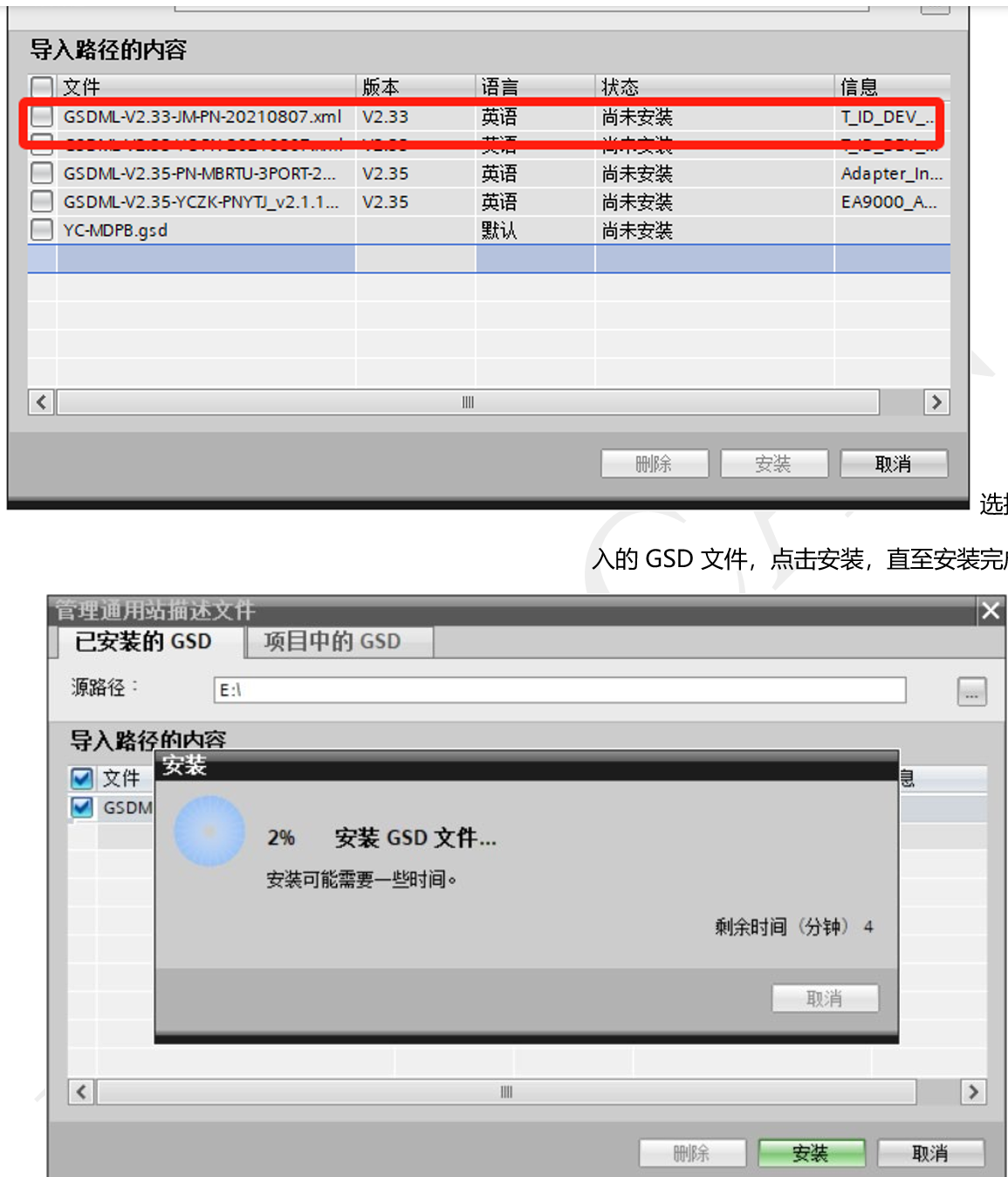
3.在西门子PLC的博途软件中创建新项目,并安装捷米特JM-PN-CAN网关的GSD文件。
4.在博途软件中添加网关,并设置网关的IP地址、设备名称等参数。
5.设置CAN通讯波特率,并添加CAN发送报文和接收报文。
6.通过Profinet转CAN网关,实现西门子PLC与工业机器人伺服驱动器之间的高效、稳定通信。
四、通信流程
1.西门子PLC通过Profinet协议发送控制指令给捷米特JM-PN-CAN网关。
2.网关将Profinet协议转换为CAN协议,并发送给工业机器人伺服驱动器。
3.伺服驱动器接收到CAN协议指令后,执行相应的动作控制工业机器人。
4.伺服驱动器将状态信息通过CAN协议发送回捷米特JM-PN-CAN网关。
5.网关将CAN协议转换为Profinet协议,并反馈给西门子PLC。
五、优势分析
1.捷米特JM-PN-CAN网关能够轻松将各种CAN设备接入到PROFINET网络中,实现设备间的高效、稳定通信。
2.该产品还支持根据节点号进行读写操作,操作更加简单方便。
3.通过Profinet转CAN网关的转换功能,还可以将老旧设备轻松地与现代设备进行集成,实现更高效、更灵活的自动化控制。
六、总结
通过使用捷米特JM-PN-CAN网关实现Profinet转CAN的通信,可以确保工业机器人与西门子PLC之间的精确控制和实时响应。该方案不仅提高了生产效率,还降低了维护成本,具有很高的实用价值。
Profinet转CAN通讯难题,找米工!


