
CT的影响因素--3D视觉
CT(Cycle Time)字面意思为循环时间,即指连续完成相同的两个产品之间的时间间隔。作为自动化设备的一个重要参数;
CT,关乎到产线的整体的产能,所以几乎所有的设备都会有CT的要求,尤其是在生产迭代特别快的3C行业。
3D线激光对于CT的影响
视觉检测作为工业领域管控产品质量的重要方式,已成为自动化设备重要的组成部分,而3D视觉的线激光传感器在尺寸测量的应用越发广泛。
但是,3D线激光传感器需要只能读取产品一行的轮廓,只有传感器产品之间有相对运动,
3D线激光才能输出完整的点云数据,这也就导致了3D传感器相比2D相机采集一张图像需要更多的时间。
影响CT的主要因素
如果把3D传感器的CT细分的话,可以分为两部分,一部分为图像采集+传输时间,另外一部分为算法处理时间(产品上下料主要牵涉到机械方面,所以暂不考虑)。
在图像采集这块,影响CT因素有相机本身的性能(比如大扫描频率)之外,还有相机的一些内部参数,比如一些黑色产品需要的曝光时间更长,或者需要多次曝光;或者产品使用了大视野,
都会影响采集的CT。另外,扫描间隔同样影响CT。产品相对传感器速度=扫描速率×分辨率,3D传感器的像素分辨率是固定的,但是两次触发的间隔,即扫描间隔是可以调整的,所以扫描方向的分辨率在这里可以
理解为扫描方向的间隔,间隔拉大同样尺寸的产品所需要的扫描行数变少了,数据量变少了,因此速度自然就提升了。
在算法处理方面,影响CT的因素也比较多,比如PC一块自然是性能越高处理会越快,尤其在用到深度学习。再就是检测项,检测项目的数量和难度与检测算法的复杂度相关联,这也会影响检测所需要的时间。
如何改善3D视觉检测CT
在图像采集方面,曝光时间、曝光模式、提高精度的算法的影响都体现在频率上,即扫描速率。
所以可以适当降低曝光,提高增益可以提高一定的频率。频率的大小也取决于3D传感器本身的硬件性能。
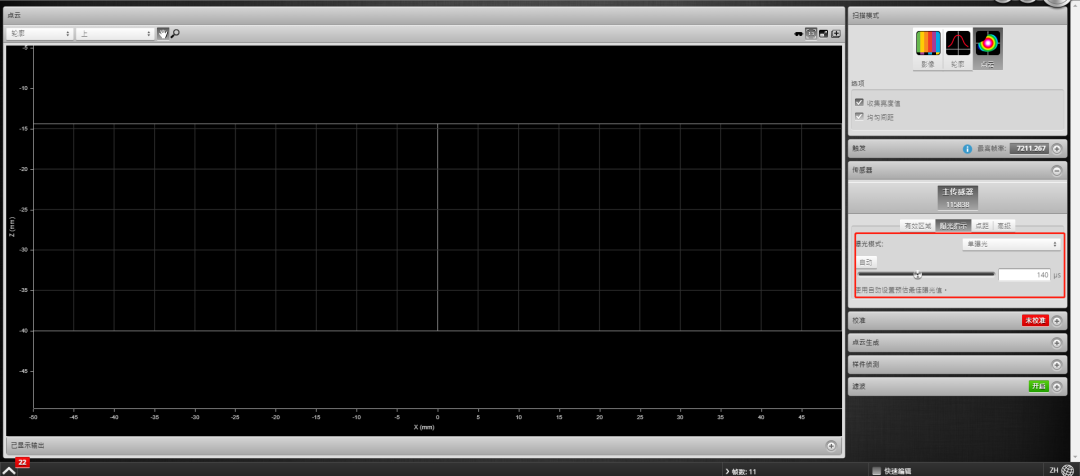
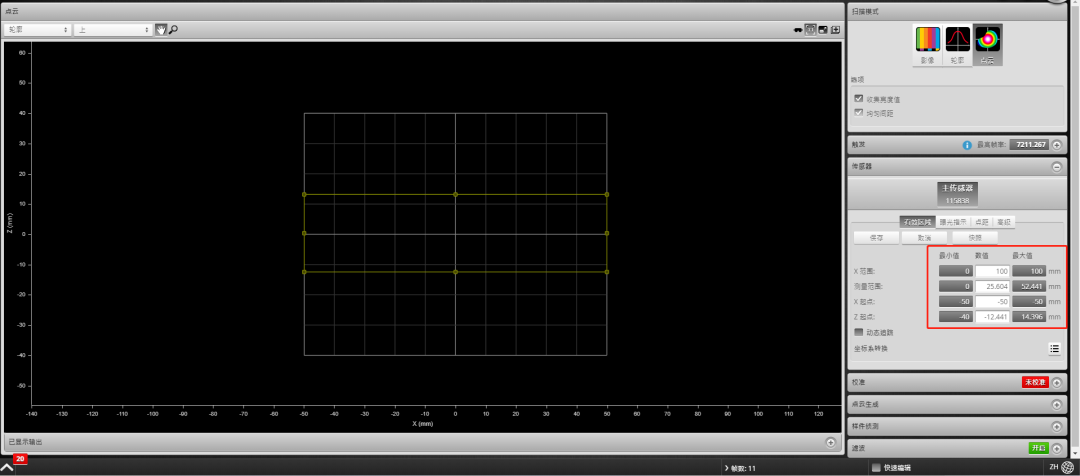
除此之外,减少传感器自身感光区域,设置小ROI,只框选所需要的区域,减少不必要的3D数据,也可以提升扫描速率。
扫描速率与检测时间
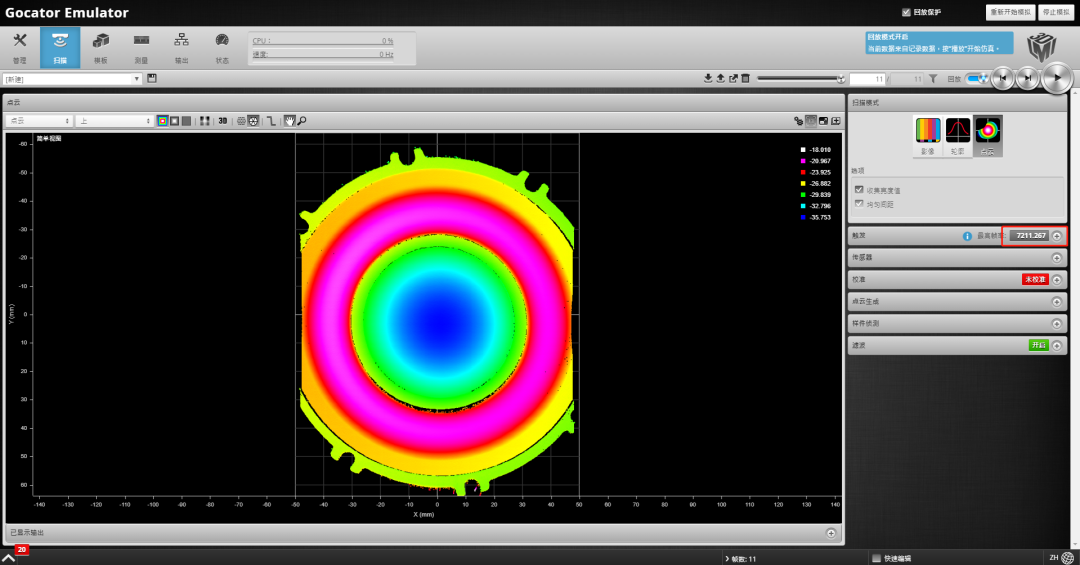
在设置好曝光、ROI等相关参数后,如何查看能达到的扫描速率?又该如何计算是否能够满足设备对检测时间的要求呢?
在Gocator软件内部的【扫描】-【触发】-【最高帧率】可以轻松查看。
在算法处理方面,在有些应用场景下,处理点云会比处理高度图需要更多的时间,并且也受检测项目复杂度的影响,
所以需要根据应用场景,以及算法平台综合评判,有时可能有优化的空间,有时优化的空间并不大。
有必要的时候,取图和算法处理可以并行,也可以节约一定的时间。而在PC配置方面要保证基础的配置要求,在使用 LMI传感器以及配套的加速器连接SDK时,
我们建议电脑的 CPU 至少是 i7 系列 7 代以上CPU,内存 8G,每增加一个传感器增加4G的内存, 有独立显卡并且安装好驱动。
如果设备的节拍过高,图像采集和算法处理方面已经没有优化的空间,可以采用MASTER组网方式,多台设备连接以提升CT。
总结
3D线激光在实际应用中CT会受到曝光方式、曝光时间、ROI、扫描间隔等因素影响,同时得到图像后,算法的处理也会占用一定的时间。
为了提升效率,节约时间,在不影响图像质量的情况下,如果曝光时间是制约扫描频率的大因素,可以优先提升增益来代替大曝光。
在产品高度差较大的时候,可以使用减小ROI区域。
另外算法处理方面,取图和算法处理在一些项目中可以并行,也可以节约一定的时间。
当然,如果节拍要求较高,传感器本身优化空间有限,并且CT的主要耗时点在传感器方面,就只能增加传感器数量,采用组网的方式处理以节约CT。


