
1. 引言
在汽车工业迈向电动化、智能化的新时代,车辆操控性能与行驶安全成为消费者和制造商共同关注的焦点。作为汽车动态性能的核心评价指标,操纵稳定性直接关系到驾驶体验、行车安全及车辆品质。汉航(北京)科技有限公司凭借自主设计研发的Hunter Mobile硬件系统与NTS.LAB软件平台,以卓越的测试技术助力行业精准对标国家标准《GB/T 6323-2014 汽车操纵稳定性试验方法》,为车企研发与品质升级提供可靠保障。
随着智能驾驶与新能源汽车的普及,操纵稳定性测试需求激增,高精度、高效率的测试方案成为行业刚需。操纵稳定性是车辆在转向、加速、制动等复杂工况下保持预期行驶轨迹的核心能力。根据《GB/T 6323-2014》标准,其测试涵盖稳态回转、转向回正、蛇形试验、转向轻便性等关键项目,旨在评估车辆在极限状态下的动态响应特性,通过量化转向灵敏度、车身侧倾角、横摆角速度等参数,提前发现转向不足/过度、车身失稳等隐患,避免潜在安全事故并为底盘调校、电子稳定系统(ESP)标定、悬架设计提供数据支撑,助力车企进一步提升驾乘体验,增强产品竞争力。

2. 汉航汽车性能测试解决方案之操纵稳定性模块:高效、精准、场景全覆盖
汉航(北京)科技有限公司技术团队深耕测试领域二十余年,基于Hunter Mobile便携式数据采集系统与NTS.LAB专业分析软件,研制开发了适配多场景的车辆操纵稳定性测试系统,全面覆盖国标要求。
2.1 系统特点
(1) 高精度硬件
Hunter Mobile采用模块化设计,支持多通道同步采集,标准采样率可达204.8kHz,精准捕捉方向转角、扭矩、加速度、陀螺仪等动态信号;
内置抗干扰技术,适应复杂电磁环境,坚固便携、IP65防护等级可在恶劣的户外条件下稳定运行;
系统轻便易部署,可快速安装于试验车辆,适用于试车场、公共道路、实验室等多场景;
支持CAN、CAN FD、Flexray总线数据接入,与整车控制系统无缝对接,实现多维度数据融合分析。

(2) 智能软件平台
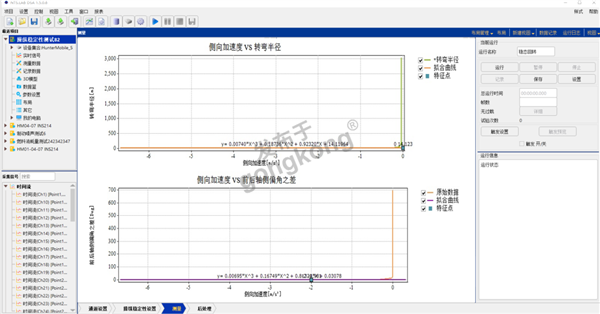
NTS.LAB内置《GB/T 6323-2014》标准模板,一键生成测试报告,自动计算特征参数(如中性转向点、横摆角速度增益等);
支持数据实时可视化与数据回放,帮助工程师快速定位问题,缩短研发周期。
2.2 蛇形试验
测试目的:
评价车辆在连续变向工况下的瞬态响应能力与车身稳定性。
测试方法:
(1) 按标准桩距(如30m)布置锥桶,车辆以恒定车速(如60km/h)进行蛇形穿桩;
(2) 记录方向盘转角、横摆角速度、侧向加速度及车身侧倾角。
核心指标计算:
侧向加速度峰值(Peak Lateral Acceleration):反映极限操控能力;
横摆角速度相位滞后(Phase Lag):方向盘输入与车身响应的延迟时间;
车身侧倾角(Roll Angle):评估抗侧倾性能。
传感器配置:
IMU(横摆角速度、侧倾角、侧向加速度)
方向盘转角力矩传感器
Hunter Mobile内置抗振动算法,有效过滤路面颠簸干扰,确保蛇形试验数据精准。
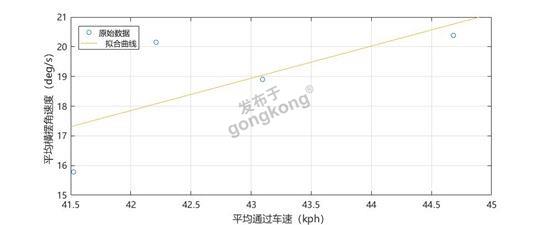
蛇行试验平均横摆角速度与车速关系曲线
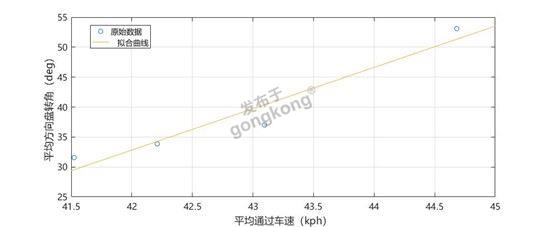
蛇行试验平均方向盘转角与车速关系曲线
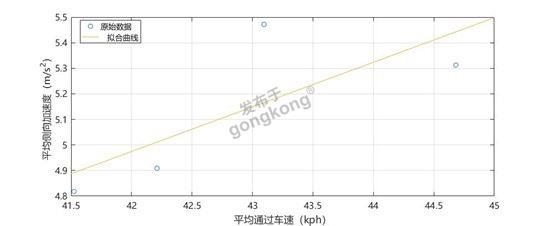
蛇行试验平均侧向加速度与车速关系曲线
蛇行试验平均侧倾角与车速关系曲线
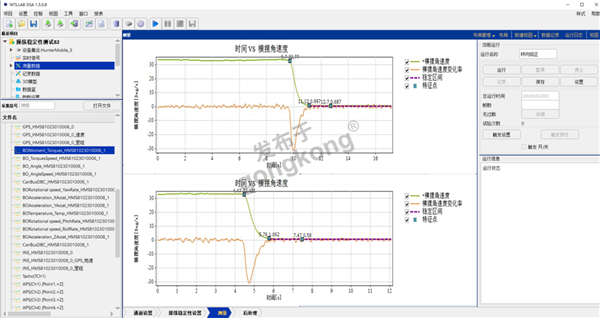
2.3 转向瞬态响应试验(转向盘转角阶跃输入)
测试目的:
分析车辆对阶跃转向输入的动态响应特性,可以验证电子稳定系统(ESP)标定效果。
测试方法:
(1) 车辆以100km/h直线行驶,快速输入阶跃方向盘转角;
(2) 记录横摆角速度、侧向加速度、车身侧倾角的瞬态响应曲线。

核心指标计算:
响应时间(Response Time):方向盘输入到横摆角速度达到稳态值90%的时间;
超调量(Overshoot):横摆角速度峰值与稳态值的百分比;
收敛时间(Settling Time):响应曲线进入稳态误差带(±5%)的时间。
传感器配置:
IMU(三轴加速度、横摆角速度)
方向盘转角力矩传感器
Hunter Mobile支持CAN总线同步获取ESP介入信号,分析电子系统对操纵稳定性的干预效果。

2.4 转向瞬态响应试验(转向盘转角脉冲输入)
测试目的:
评估车辆在短时剧烈转向输入下的抗干扰能力与恢复特性。
测试方法:
(1) 车辆以指定车速行驶,施加脉冲式方向盘转角输入(如0.5Hz方波);
(2) 记录车身横摆角速度、侧向加速度及方向盘力矩的振荡衰减过程。
核心指标计算:
幅频特性(Amplitude-Frequency Response):不同频率输入下的增益与相位变化;
阻尼比(Damping Ratio):反映系统振荡衰减速度。
传感器配置:
IMU(横摆角速度、侧向加速度)
方向盘转角力矩传感器
NTS.LAB内置频域分析工具,可自动生成Bode图,直观展示系统稳定性。
2.5 转向回正试验
测试目的:
检验车辆在转向后方向盘自动回正的能力,评估转向系统与悬架匹配性。
测试方法:
(1) 车辆以目标侧向加速度圆周行驶,稳定车速后迅速松开方向盘;
(2) 记录方向盘回正过程中的残余横摆角速度、剩余侧向加速度及回正时间。
核心指标计算:
回正残余角速度(Residual Yaw Rate):松手后1秒内横摆角速度的衰减值;
回正时间(Return Time):方向盘从最大转角回正至±10°范围内所需时间。
传感器配置:
方向盘转角力矩传感器
IMU(横摆角速度、侧向加速度)
NTS.LAB软件可自动标记回正起始点,生成衰减曲线并计算关键参数。

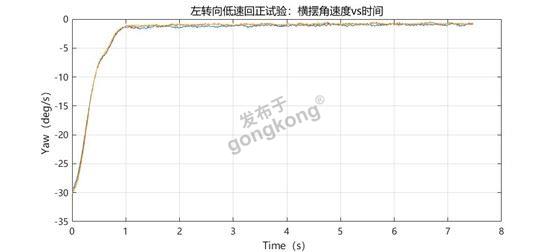
左转向低速回正试验曲线
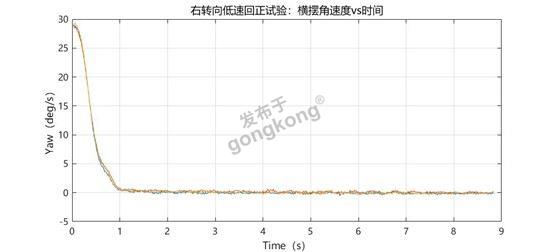
右转向低速回正试验曲线
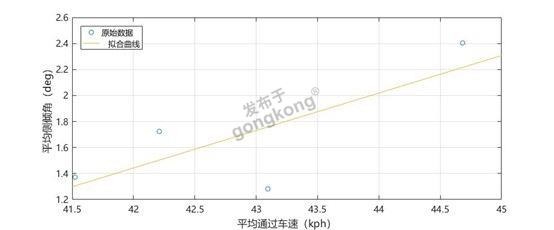
2.6 转向盘中心区操纵稳定性试验
测试目的:
评估车辆在方向盘小转角输入、低侧向加速度工况下的转向性能与动态响应特性。
测试方法:
(1) 试验的初始状态为等速直线行驶,试验标准车速为100km/h,也可以100km/h车速为基准,提高或降低试验车速(车速间隔为20km/h);
(2) 试验时转向盘输入为振荡型转角输入,首选输入形式为正弦波。转向盘输入频率的基准值为0.2 Hz,频率偏差不应超过±10%。输入转角的幅值应足以使车辆的侧向加速度峰值达到基准值,允许的峰值偏差为±10%。为在侧向加速度1m/s²时获取良好的试验数据,并保证车辆及其子系统运行范围超出迟滞区,侧向加速度峰值的基准值为2m/s²,也可采用较小的值或不超过4m/s²的其他值。
核心指标计算:
转向灵敏度
转向盘力特性
转向功灵敏度
传感器配置:
车速仪
转向盘力矩、转向盘转角测量仪
汽车操纵稳定性测试仪
多通道数据采集系统

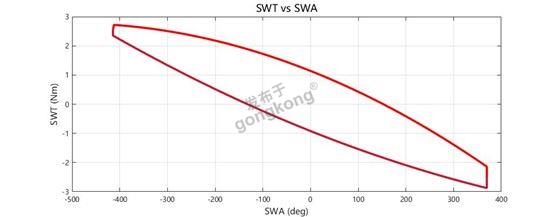
中心区试验转向盘力矩与转向盘转角曲线

中心区试验横摆角速度与转向盘转角曲线
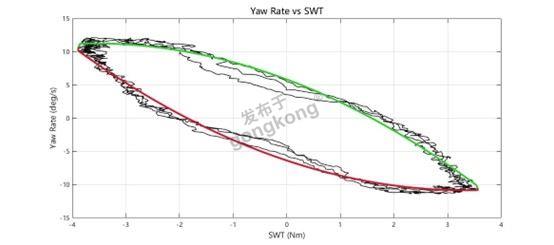
中心区试验横摆角速度与转向盘力矩曲线
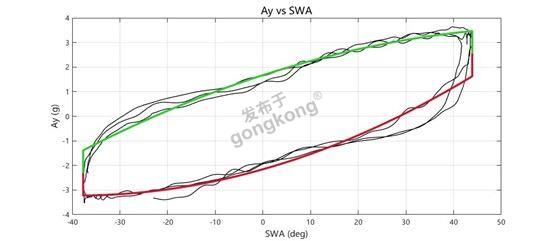
中心区试验侧向加速度与转向盘转角曲线
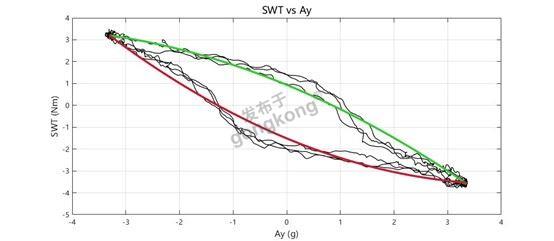
中心区试验转向盘力矩与侧向加速度曲线
2.7 转向轻便性试验
测试目的:
量化方向盘操纵力,验证转向系统助力特性是否符合人机工程学要求。
测试方法:
(1) 由中心点沿双纽线路径行驶平稳驾驶;
(2) 记录方向盘力矩、转角、车速。

核心指标计算:
转向力矩梯度(Steering Torque Gradient):单位方向盘转角的力矩变化;
转向功(Steering Work):力矩-转角曲线积分值,反映转向系统能耗。
传感器配置:
方向盘力矩/转角传感器
转向柱位移传感器
NTS.LAB提供转向力-位移关系曲线分析功能,支持与设计目标值对比。
转向轻便性试验转向盘力矩与转向盘转角曲线
2.8 稳态回转试验
测试目的:
评估车辆在稳态转弯时的转向特性(不足转向/中性转向/过度转向),验证底盘调校合理性。
测试方法:
(1) 车辆以最低稳定车速(如10km/h)沿固定半径圆周行驶,逐步加速至侧向加速度达到目标侧向加速度值(或车辆极限);
(2) 记录方向盘转角、横摆角速度、侧向加速度、车速等参数。

核心指标计算:
不足转向度:
式中:
α--前后轴侧偏角之差,单位°;
ay--侧向加速度,单位m/s2。
车身侧倾度(线性回归公式):
式中:
φ--车身侧倾角,单位°;
ay--侧向加速度,单位m/s2。
传感器配置:
IMU(测量侧向/纵向加速度)
陀螺仪(横摆角速度)
方向盘转角力矩传感器
轮速传感器/GPS速度传感器(车速计算)
Hunter Mobile支持多种类型的传感器同步采集,模拟通道采样率可达204.8kHz,确保动态数据无失真。
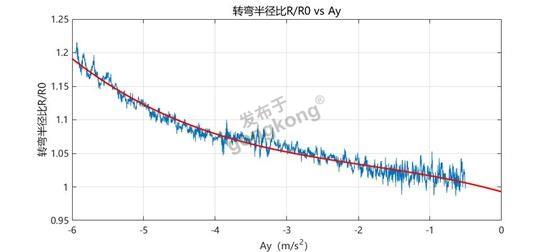
稳态回转试验转弯半径比与侧向加速度曲线
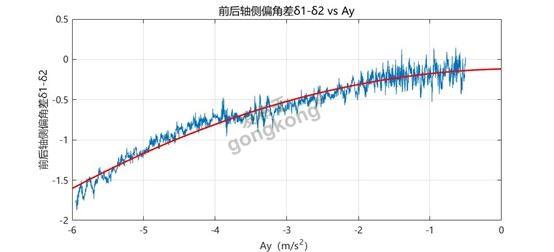
稳态回转试验前后轴侧偏角差与侧向加速度曲线
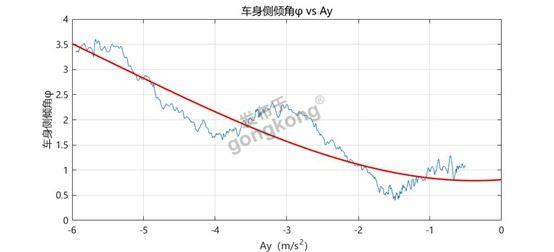
稳态回转试验车身侧倾角与侧向加速度曲线
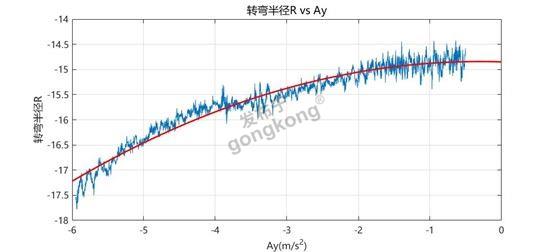
稳态回转试验转弯半径与侧向加速度曲线
3. 结语
在汽车工业百年变革的浪潮中,每一次方向盘转动的精准反馈,每一次极限弯道的车身姿态控制,都凝聚着人类对安全与性能的极致追求。操纵稳定性测试,正是这场追求中最严谨的科学注解——它用数据解构驾驶体验,用参数定义安全边界,将感性的操控感受转化为可量化、可优化、可验证的工程语言。
作为汽车动态性能测试的“标尺”,汉航Hunter Mobile与NTS.LAB系统提供的不仅是一套技术规范,更是对生命安全的庄严承诺。从稳态回转试验中不足转向梯度的毫厘把控,到蛇形穿桩时ESP介入时机的微妙标定,每一项测试都在回答一个根本命题:如何在速度与稳定之间找到最佳平衡点,让每一次转向都成为驾驶者与汽车的默契对话。通过Hunter Mobile硬件系统的精准的测控感知与NTS.LAB软件平台的便捷化智能化的解析,我们将复杂的动力学参数转化为清晰的工程决策依据。无论是新能源车高扭矩输出带来的瞬态响应挑战,还是智能驾驶时代人车协同控制的精度需求,汉航公司将始终以三大核心价值赋能行业:
精准性:优秀的数采前端捕捉微秒级动态变化,让车身震颤、转向迟滞无所遁形;
穿透力:从传感器原始信号到国标合规报告的全链路分析,直指底盘调校的本质矛盾;
预见性:NTS.LAB数据库支持异常检测与虚拟标定,让90%的潜在问题消弭于样车制造之前。
当下,汽车“新四化”的浪潮正重构行业竞争规则,但无论技术如何演进,对安全与性能的追求始终是车企的立身之本。汉航愿以十年磨一剑的技术积淀,与行业同行者共同探索更精密的测试方法、更高效的验证体系、更智能的解决方案,因为我们深知,每一组精确数据的背后,都是对生命的敬畏;每一次技术突破的实现,都在推动人类向更自由的出行未来迈进一步。

