SCARA四轴机械手原点回归不到0,尤其是3轴和4轴,总在个位到十位数之间晃悠,关闭伺服时,还能偏差多一些。这个情况,是不是机械臂有轻微微的一点传感的震动造成的?加装5MM橡胶减震底片,不见效果。反反复复,3/4轴原点回归无法置零。请指教!
1分不嫌少!
赏
已有1人打赏

SCARA四轴机械手原点回归不到0,尤其是3轴和4轴,总在个位到十位数之间晃悠,关闭伺服时,还能偏差多一些。这个情况,是不是机械臂有轻微微的一点传感的震动造成的?加装5MM橡胶减震底片,不见效果。反反复复,3/4轴原点回归无法置零。请指教!
可能原因分析:
机械磨损和松动:长期使用和不良维护可能导致机械部件磨损和松动,影响定位精度。特别是3轴和4轴,由于频繁运动,磨损可能更为严重。解决方法包括维护和检修机械部件,更换磨损件,紧固松动部件。
机械振动和共振:机械结构中的振动和共振现象会增大定位误差。增加结构刚度、减小负载惯量、增加物料粘度等措施有助于消除或减小振动和共振。
机械偏心和偏移:机械部件的偏心和偏移也会导致定位误差。通过调整零部件位置、使用精确的定位元件和轴承等措施可以解决此问题。
控制算法不准确:控制算法的精度和实时性直接影响伺服电机的定位精度。对于高精度应用,可能需要采用更先进和复杂的控制算法。
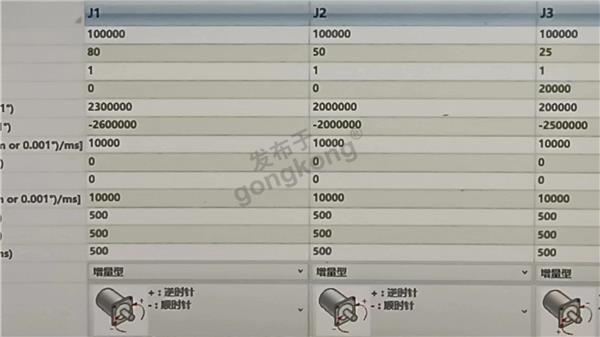
整定参数不合理:控制系统的整定参数对伺服电机的性能有重要影响,包括定位精度。需要通过试验和调整来确定最优参数,以实现更好的动态性能和定位精度。
反馈信号不准确:伺服电机的定位精度依赖于反馈信号的准确性。确保传感器良好、传输误差小、信号处理精度高是提高反馈信号准确性的关键。
温度变化:温度变化会引起机械部件的膨胀和收缩,导致定位误差增大。在大温差环境下工作时,需采取加热装置、温度补偿系统等措施来减小影响。
湿度和尘埃:高湿度和尘埃环境会导致机械部件生锈、腐蚀和污染,降低定位精度。需保持工作环境清洁干燥,并对机械部件进行保护和维护。
零点丢失:电池电压不足、接触不良、剧烈震动等都可能导致零点丢失。重新标定零点时,需确保标定过程准确无误。
标定方法:不同的机械手和机器人可能采用不同的标定方法。如ABB的SCARA采用校准销撞校准块的方式,而YAMAHA则采用传感器方式。标定方法的选择应根据机械手的具体型号和精度要求来确定。
程序编写错误:程序编写有误也可能导致机械手运动过程中出现位置偏差。需检查并修改程序中的错误。
操作不当:未按照规定操作机械手也可能导致定位精度下降。需加强操作人员的培训和管理。
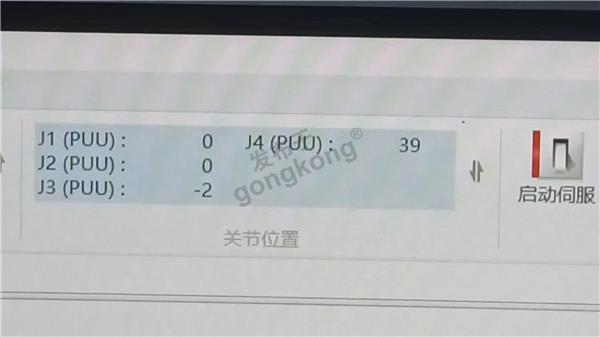
如视频所见已在0点正负1的状态上,经写入,重启,选择MCS点动,还是报警未全轴归零。或许更换电池试试。
感谢求助者和答疑者对求助答疑板块的厚爱,赠人玫瑰,手留余香。
对于求助者要求:
1、请在一个月内自行结贴,把悬赏积分(如果设置积分悬赏求助)发放给答疑者;
2、如果在求助答疑过程中,自己已经有效解决问题,建议大家把解决问题方法在自己求助帖分享,有效分享可以获得50积分奖励。
3、求助答疑板块版主结贴时间一般滞后30~45天,以方便大家对求助问题答疑足够时间,也为了每一个优秀答疑人员都可以获取到自己的积分和MP奖励。
4、2024龙年加油!龙年棒棒!

