
今天,让我们一起来探索一款由正运动技术自主研发,自主自研的一款全国产EtherCAT运动控制边缘控制器——ZMC432H的使用系列课程。
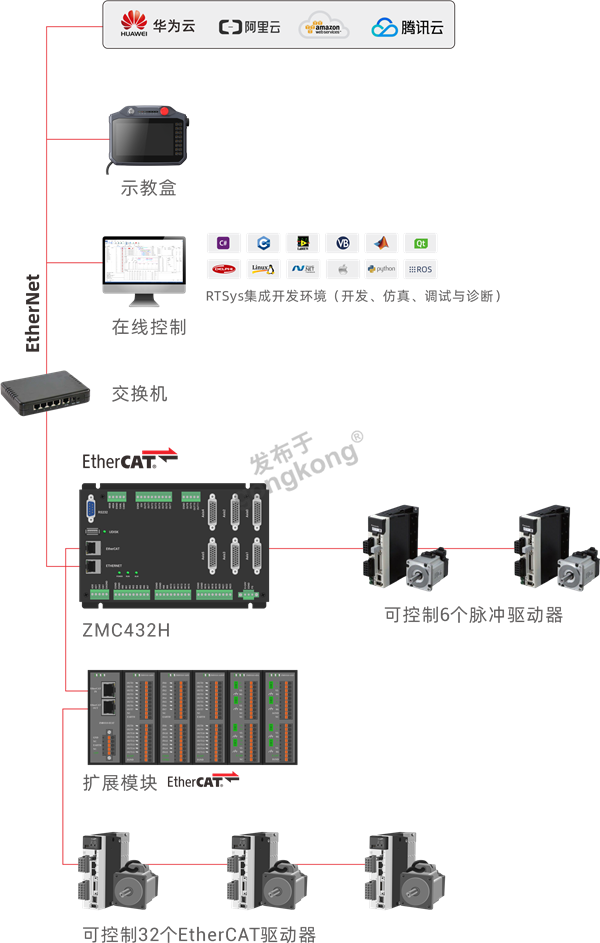
全国产EtherCAT运动控制边缘控制器ZMC432H是正运动的一款软硬件全国产自主可控,运动控制接口兼容EtherCAT总线和脉冲型的独立式运动控制器,最多支持32轴运动控制,同时支持正运动远程显示功能,能提供网络组态显示,可实时监控和调整参数配置。
ZMC432H具备丰富的硬件接口和控制功能模块,能实现高效稳定的运动控制和实时数据采集,以满足工业控制协同工业互联网的应用需求。
今天,我们将通过使用教程系列,深入理解ZMC432H的操作流程,以更好地运用和协调这款国产运动控制器,将其优势发挥到极致。
以下是一系列教程,点击对应文章标题即可进入对应教程,希望能帮到有需要的朋友。
全国产EtherCAT运动控制边缘控制器(一):ZMC432H硬件接口
全国产EtherCAT运动控制边缘控制器(二):统一的上位机API接口
全国产EtherCAT运动控制边缘控制器(三):外设读写与RTSys开发诊断
全国产EtherCAT运动控制边缘控制器(四):轴参数配置与单轴运动PC上位机C++控制
全国产EtherCAT运动控制边缘控制器(五):IO配置与回零运动的Python+Qt开发
全国产EtherCAT运动控制边缘控制器(六):RtBasic文件下载与连续轨迹加工

