本节课程我们主要讲解一下正运动API函数封装原理以及自定义API封装例程。
正运动技术运动控制器均使用统一的API接口


以下为各个功能部分API指令一览表;

2、控制器信息获取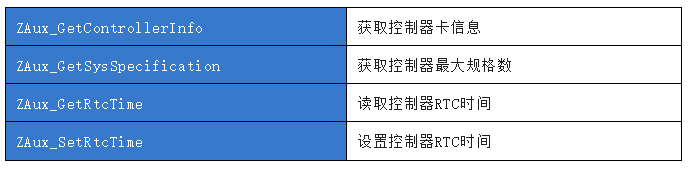
3、基本轴参数设置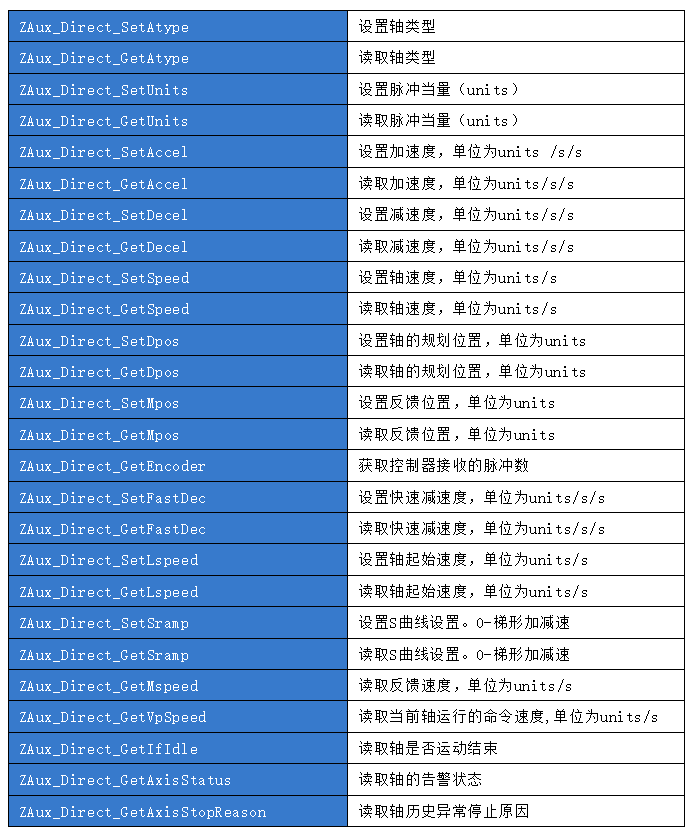
4、基本运动控制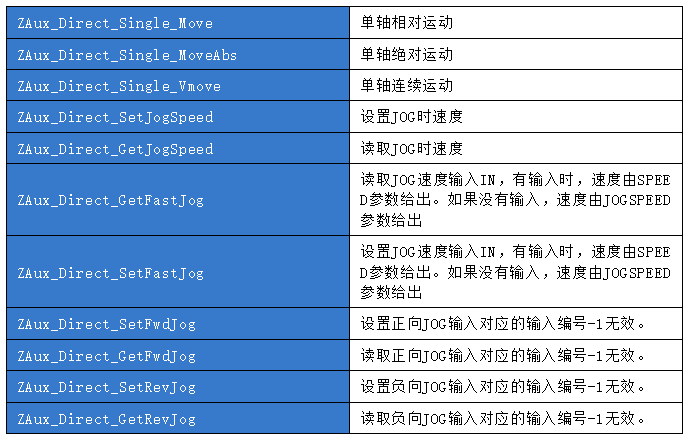
5、VR寄存器

7、Modbus寄存器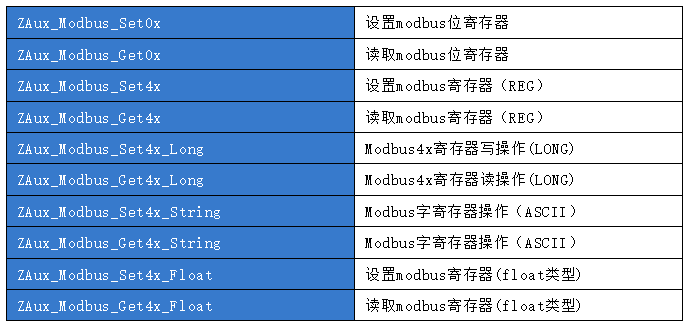
8、Flash/文件读写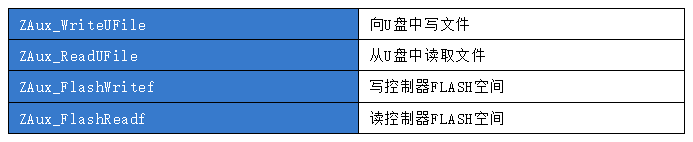
更多API接口详情可以参考“ZMotion PC函数库编程手册 V2.1.1”。
如果想了解更多内容,请点击《全国产EtherCAT运动控制边缘控制器(二):统一的上位机API接口》继续往下看更详细的内容。

本节课程我们主要讲解一下正运动API函数封装原理以及自定义API封装例程。
正运动技术运动控制器均使用统一的API接口
以下为各个功能部分API指令一览表;
2、控制器信息获取
3、基本轴参数设置
4、基本运动控制
5、VR寄存器
7、Modbus寄存器
8、Flash/文件读写
更多API接口详情可以参考“ZMotion PC函数库编程手册 V2.1.1”。
如果想了解更多内容,请点击《全国产EtherCAT运动控制边缘控制器(二):统一的上位机API接口》继续往下看更详细的内容。
点击正运动技术官网:www.zmotion.com.cn 或拨打 400-089-8936 获取更多学习资料和产品资料
——更多精彩内容请关注“正运动小助手”公众号
——更多精彩产品视频介绍请关注“正运动技术”抖音号
正运动技术专注于运动控制技术研究和通用运动控制软硬件产品的研发,是国家级高新技术企业。正运动技术汇集了来自华为、中兴等公司的优秀人才,在坚持自主创新的同时,积极联合各大高校协同运动控制基础技术的研究,是国内工控领域发展最快的企业之一,也是国内少有、完整掌握运动控制核心技术和实时工控软件平台技术的企业。主要业务有:运动控制卡_运动控制器_EtherCAT运动控制卡_EtherCAT控制器_运动控制系统_视觉控制器__运动控制PLC_运动控制_机器人控制器_视觉定位_XPCIe/XPCI系列运动控制卡等等。

