固态激光雷达赋能园区无人接驳车 构建低速自动驾驶感知底座 点击:24 | 回复:0

园区无人接驳车是低速封闭场景自动驾驶的核心落地载体,常态化运营对车载感知器件的可靠性、集成度及环境适应性提出了严苛的场景化专项要求。相较于传统感知硬件,固态激光雷达凭借无机械运动部件、高集成度、长使用寿命的核心特性,成为无人接驳车实现全场景、高稳定运行的核心感知设备,从测距原理、扫描成像、抗干扰感知到高精度定位,全链路赋能低速自动驾驶系统能力落地。

当前主流固态激光雷达采用直接飞行时间测距原理,依托全固态激光发射与接收阵列,向外发射近红外激光脉冲;激光光束接触障碍物表面反射后,由高灵敏度感光单元精准捕获回波信号。系统通过高精度计时模块测算激光脉冲往返时长,结合光学传播特性完成数据修正,精准输出目标物体的距离参数。针对园区低速作业场景,行业主流方案采用成熟近红外激光波段,兼顾设备性能与落地成本;高阶适配方案则选用人眼安全激光波段,有效提升雨、雾、沙尘等复杂天气下的感知稳定性。在无人接驳车常规作业半径内,该设备可持续保持高精度测距状态,搭配高帧率输出特性,完全匹配低速自动驾驶车辆的实时感知、快速响应的核心需求。
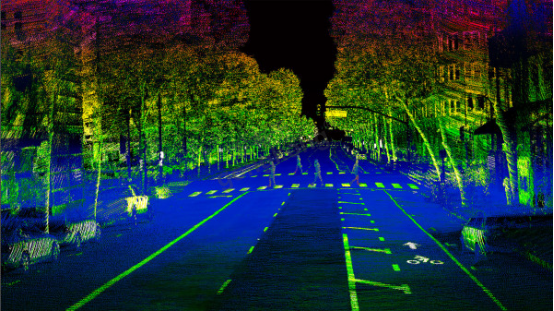
与传统机械式激光雷达扫描方案不同,固态激光雷达无任何机械扫描运动部件,依靠纯固态光学器件实现激光光束空间偏转与全域视场覆盖,设备整体结构高度集成、体积紧凑,具备更强的抗振动、抗冲击能力,完美适配园区颠簸路面、高频启停、24小时连续运营的严苛工况与长寿命使用需求。同时,其视场参数针对园区场景完成定向优化,水平视场可全面覆盖车身周边行驶区域,保障行车侧向安全;垂直视场兼顾地面碎石、杂物、路沿等低矮障碍物与高空悬挂标识、限高设施,实现高低空域全方位感知。设备完成单帧扫描后,可将所有测距点的角度、距离信息转化为三维空间坐标,生成高密度、高精度三维点云数据。针对接驳车近身避障、近距离停靠等核心安全场景,设备可动态强化近距离区域点云密度,精准还原细小障碍物的完整轮廓,为后端自动驾驶感知算法提供精细化、高保真的数据输入。
园区运营场景环境复杂,光照突变、玻璃幕墙强光反射、多车并行作业、雨雾扬尘干扰等问题频发,极易影响感知数据准确性。对此,固态激光雷达通过多重技术机制全方位保障感知数据稳定可靠:光学端搭载专用窄带滤光器件,有效过滤自然光、环境杂光等干扰源;信号处理端采用多回波检测技术,精准区分雨雾、浮尘等干扰回波与真实障碍物回波,规避无效数据干扰;同时搭载伪随机脉冲编码技术,从源头杜绝多台车辆激光设备相互串扰的问题,实现全天候稳定感知。此外,优化升级的自动增益控制逻辑,大幅提升车辆近距离感知性能,彻底消除车身周边近距离感知盲区,完美适配行人近身绕行、站点精准停靠、低速避障等园区高频作业场景。
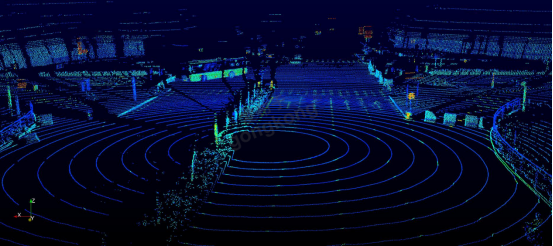
在定位与多传感器融合维度,固态激光雷达输出的高精度三维点云数据,可高效支撑激光SLAM技术落地应用。通过提前构建园区全域高精度点云地图,车辆行驶过程中依托实时点云特征匹配算法,融合惯性导航、车轮测速等多维度数据,可在楼宇遮挡、地下通道、室内盲区等无卫星信号的复杂区域,实现厘米级精准定位,保障车辆严格沿预设路径行驶,完成站点精准停靠、自动对位等核心操作,大幅提升接驳运行的安全性与规范性。
综上所述,固态激光雷达凭借全固态架构带来的高稳定性、高可靠性,以及针对性的场景化感知优化能力,为园区无人接驳车搭建了坚实、可靠的三维感知底座。随着固态激光雷达技术持续迭代成熟、量产成本稳步优化,将进一步加速低速自动驾驶技术在园区、景区、校园等封闭场景的规模化落地与普及应用。






官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
