大神们ModbusRTU轮询通信,读轮询写优先该怎么写程序呢 点击:6357 | 回复:19







楼主最近还看过

"zhangleiChina" 的回复,发表在1楼
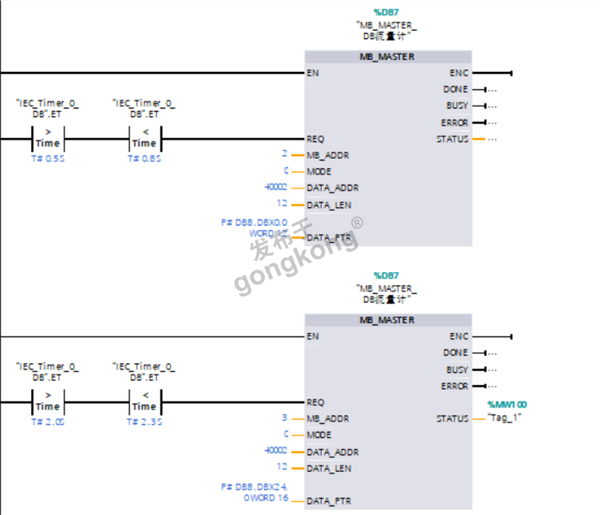
对内容: 【我常用的轮训方式有三种,下面以西门子1200为例1、时间轮训,这种最常用也比较稳定,通讯时间可调,下图中可见;2、移位轮训,本质上是时间轮训,形象点可以理解为流水灯的模式;3、DONE、ERROR轮训...】进行回复:
-----------------------------------------------------------------
我用的第三中完成位来触发下一个的通信轮询,通信太多读写在一起,有一个通信不上就会卡死,或者说轮询的时间太长,写入指令会要很长时间。
回复本条
-

"zhangleiChina" 的回复,发表在1楼
对内容: 【我常用的轮训方式有三种,下面以西门子1200为例时间轮训,这种最常用也比较稳定,通讯时间可调,下图中可见;移位轮训,本质上是时间轮训,形象点可以理解为流水灯的模式;DONE、ERROR轮训,就是将第一...】进行回复:
-----------------------------------------------------------------
初始化完成位用来启动第一个触发,第一个完成位启动第二个触发,第二个触发又去触发第一个,然后就是搞个超时,如果第一个完成位超时就启动第二个,不受第一个通信异常影响
回复本条
-

"关育谋" 的回复,发表在3楼
对内容: 【读操作轮询执行,每次读操作执行完成后判断有没有写操作,如果有写操作,优先执行写操作;如果没有写操作,执行下一个读操作,依次循环。那么写操作就要预先暂存,将写操作数据暂存,然后预写标志位置位,这个时候一...】进行回复:
-----------------------------------------------------------------
不错!我也有遇到这种情况,想不通怎么解决定时读和偶发随机写会导致冲突的问题,这个方法受教了。后续做上位机也需要这种理念,感谢!
回复本条
-
早前有做一个40多轴的项目,三菱PLC,伺服主要是三菱的光纤型,步进用了13个雷赛的,对步进轴的要求没有伺服高,但要求实时读取轴的位置速度,以及人员操作任意轴没有延时的感觉;实现这个效果,就需要考虑到数据的采集量以及实时响应用户操作上。
1、波特率尽可能的使用硬件允许的最高频率;
2、485使用双脚屏蔽线,接好地线,避免干扰;
程序方面有下面几点。
第一:配合触摸屏,实现选择性的读取数据,例如当前要显示的数据;
第二:优先响应当前操作轴的写入指令;
第三:其他优先级低的待刷新指令;
优先级:操作指令(自动和手动)> 读取当前显示的数据及反馈位置数据 > 其他待刷新数据
回复本条
-

引用 "SiegeLion007" 的回复,发表在17楼
内容: "Smile-lyc" 的回复,发表在16楼 对内容: 【感谢求助者和答疑者对求助答疑板块的厚爱,赠人玫瑰,手留余香。对于求助者要求:1、请在一个月内自行结贴,把悬赏积分(如果设置积分悬...
悬赏贴如何结贴?这里看过来!
http://bbs.gongkong.com/d/201810/772613/772613_1.shtml
回复本条
-

- 西门子伺服电机样本大全及最...
 [425]
[425] - 1200模拟量转换库文件[1436]
- siemens winccflexible 视频...[371]
- win8系统能用的PLCS7-200编程...[2802]
- 将西门子smartIE屏应用于S7-...[395]
- 引领创新同心致远--西门子创...[1492]
- 求各位大侠帮忙[1098]
- S7—1200的PLC中,通过通讯读取...[431]
- EM231,4输入热电偶模拟量和普...[389]
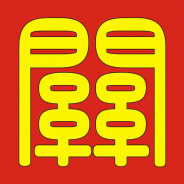
- 关于200smart的485轮询通信问...[655]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
