一山不容二虎?双电机或气缸液压同步驱动怎样处理较好 点击:529 | 回复:0


文中参考文献,模型源文件均提供下载,见文末。
关注公众号“机械与艺术”,回复 “20200502” 获取参考文献和三维模型下载地址

图 | 古罗马四帝共治版图(来源:百度百科)
辉煌的古罗马帝国在公元3世纪曾有过4个皇帝共同执政的局面,史称四帝共治时期。虽然开创这一制度的戴克里先初衷是为了避免帝国内部叛乱,和领导阶层被外敌一锅端。但在其死后这一制度迅速土崩瓦解,并不可挽回的导致罗马帝国永久分裂和消亡。历史的经验指明了多个头部领导是多么的不靠谱。
在我们机械自动化设计的过程中也会经常遇到需要两个动力驱动同一个部件的情况。这通常出现在单个电机无法提供足够的动力,或者机械结构不允许安装单个动力部件的时候。同理,这种情况也发生在气动和液压作为动力的场所。本文从电机驱动,气动和液压三方面介绍一下双动力同步驱动的解决方案。
例如下图中的体积巨大的龙门结构,传统的传动设计是在龙门横梁上固定一个电机带动两个同步轮、丝杠的传动装置如图1:
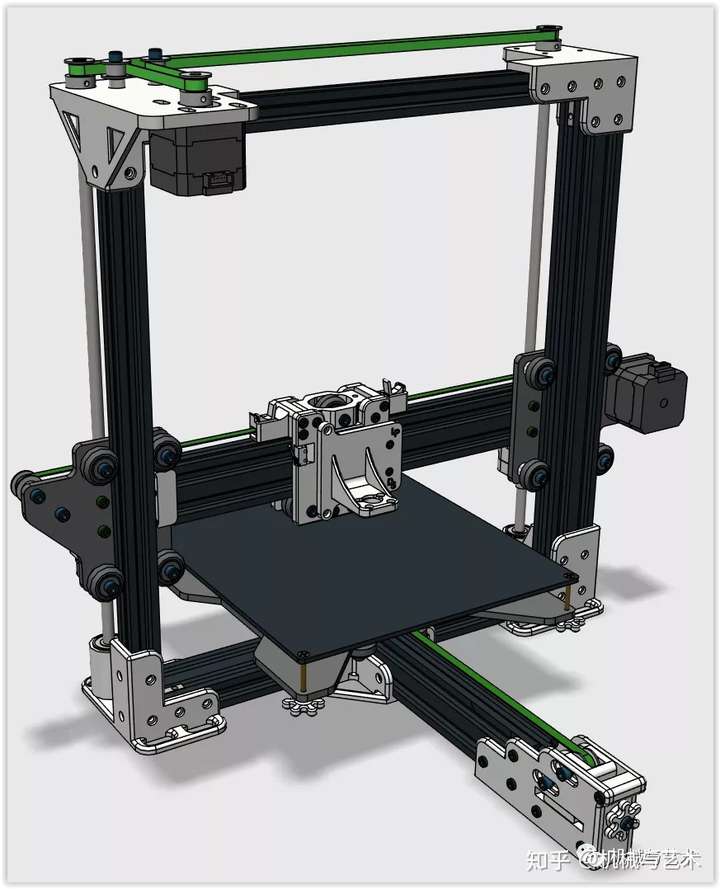
图1 | 单动力驱动升降装置
或者通过一个气缸进行升降如图2:
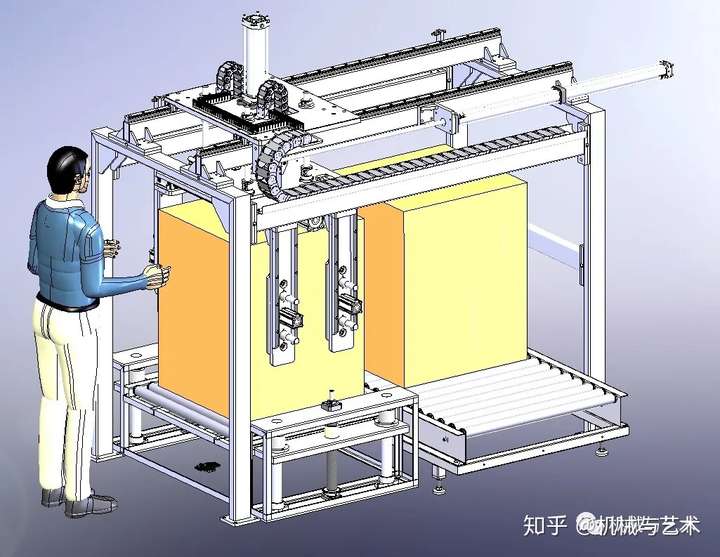
图2 | 顶部气缸提升机构
当然能用机械机构解决是最好不过了,不仅控制简单,稳定,精度高;电气工程师也是喜闻乐见的。但如果横梁的上下空间有限,或需要执行加工工序,甚至被巨大的工件从中隔断,就必须为双边各自配备一个动力,如图3、4。
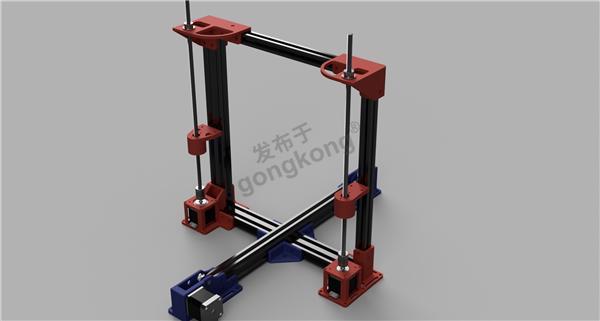
图3 | 双电机两侧各自提升
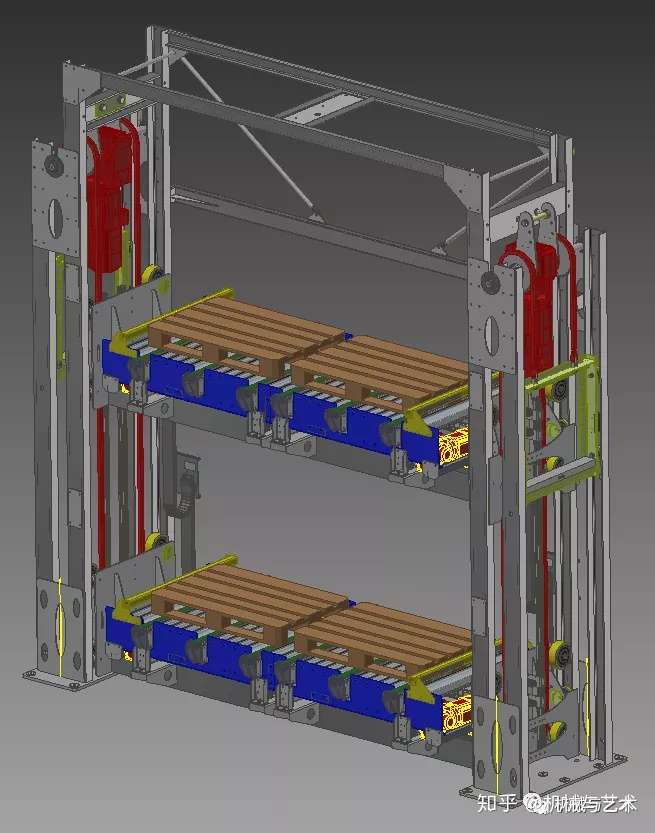
图4 | 两侧独立电机链条提升机
首先我们抓住双动力驱动的主要矛盾:1.如何保证两动力源速度一样由于相同动力部件不可避免的存在机械特性差异,和控制信号传导导致的时间差,都会影响动力部件的同步运行。2.如何保持两动力源的负载平衡当两个动力部件的负载不一样时,一个很轻松,一个累成狗。这样就会出现反应速度上的差距,特别是对刚性连接的两个部件,很容易造成机械结构的损坏甚至崩断。
一.双电机同步控制:由于标称参数相同的电机不一定具有相同的实际参数,对于相同的输入指令,两电机实际运动情况可能不同。主流的双电机同步控制是采用矢量变频控制器对两个动力源实现主从动控制。我们要选择其中一个电机作为主动部件,另一个跟随。就好像一山不容二虎,除非一公一母,如图5所示:
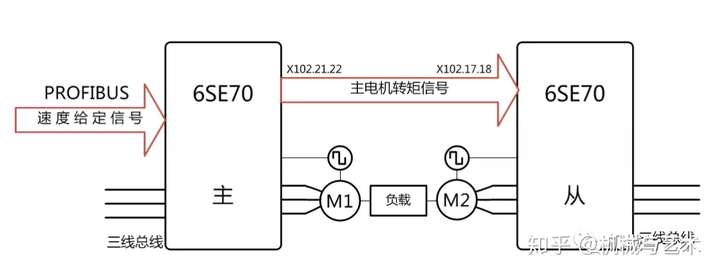
图5 | 同步电机转矩跟随控制(1)6SE70为西门子矢量变频控制器(2)X102.21.22、X102.17.18为变频控制器接口
操作步骤:(1)主动装置接受PLC速度给定信号;从动装置接受转矩信号,转矩信号由主动装置输出(2)至此从动装置的转矩与主动装置一样,从而保证负载平衡(3)由于速度与转矩的相关性,保证了从动装置与主动装置的速度一样。
有聪明的小伙伴就要问了,这不同时间内速度还是不一样吗,直接给主从动装置速度信号不行吗?
当然可以。
把主从装置设置成伺服编码器反馈的速度闭环控制,就可以保证同步了,但是当双方的负载不一样时,转矩就不一样,速度也会不一样。双方不能同步调整速度,也就无法保证同一时刻的速度一样了。因此我们可以在此基础上增加一个转矩限幅控制,如图6。
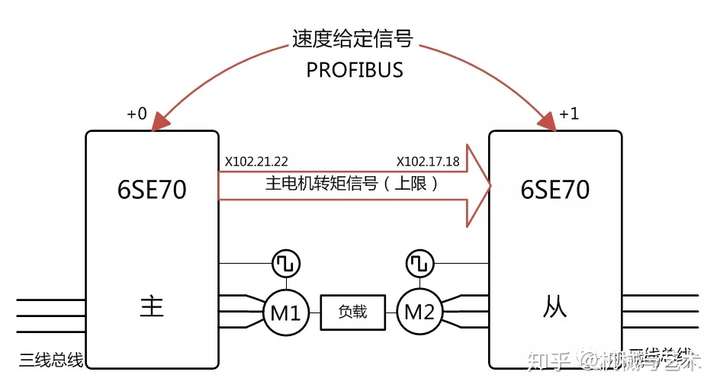
图6 | 同步电机转矩限制跟随控制
操作步骤:(1)PLC同时给主从动装置速度信号,但从动装置的速度比主动装置更快(2)从动装置的转矩因此也比主动装置更大(3)在此基础上将主动装置的转矩作为从动装置转矩的上限(4)强行将从动装置的转矩限制于主动装置一样。
当然这是基于有编码器闭环控制情况下的操作,不差钱儿的小伙伴可以采用。而对于一些大型工程机械类的普通电机加变频器的控制搭配下,就需要在机械结构上增加外部信号反馈装置,如位置传感器,光栅尺,力矩传感器,从而形成一个闭环控制。但原理还是主从动控制,具体的控制步骤可以参考《双电机驱动升降机构运动实时同步控制技术》,其中有对不同运动模式下的详细描述。还有通过PID反馈补偿原理控制双电机的《双电机驱动同步控制系统的研究进展与关键技术》,但是PID的参数不能动态改变,而且很难调...

二.双气缸同步运动控制:气动系统的同步运动控制主要体现在于接线上面。由于气体的可压缩特性,气动元件很少用作过程的控制,主要用于起始点的位置控制。也正是这个原因,不像电机驱动那样过刚则断,只要连接两个气缸的机械构件刚度足够大,是可以维持两个气缸的同步运动。但是要是两个独立的气缸咋办?
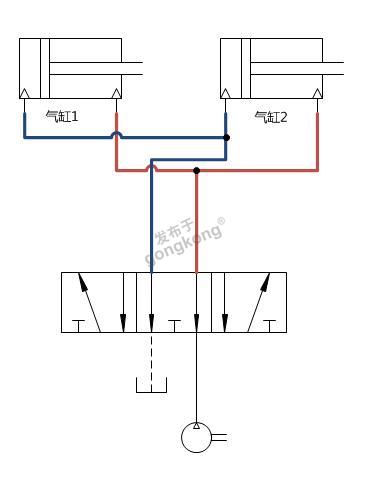
图7 | 一般同步气缸接线方式
如图7,这是一般双气缸的接管方式,使用一个电磁阀同时控制两个气缸:普普通通
来看看进阶版的接管方式:
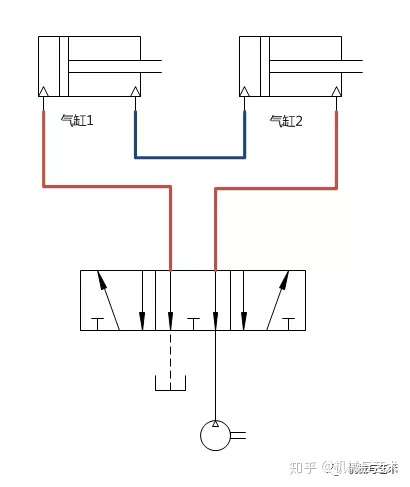
图8 | 首尾相连同步气缸接线方式
图8即将一气缸的有杆腔与另一气缸的无杆腔串联起来,使两气缸同向运动时的有效工作面积和气流量相等,从而使运动中的两气缸速度和位置保持一致。

有小伙伴又要问了,第一个速度矛盾是解决了,第二个负载平衡还没解决,这气缸还是没法保证同步呀。
是的,理想很丰满,现实很骨感。为了解决负载动态平衡的问题,我们在看看风Sao的接管方式:

图9 | 带减压阀的首尾相连同步气缸接线方式
在两气缸的串联点和电磁阀的出气口各增加一个单向阀(上)和一个液控阀(下):
(1)当气缸1的负载F1大于气缸2的负载F2(F1≥F2),气缸1跟不上气缸2的速度时,上端单向阀打开,给气缸一增加推力,气缸1加速前行,直至上端单向阀关闭。
(2)当气缸1的负载F1小于气缸2的负载F2(F1≤F2),气缸1的速度大于气缸2,下方液控阀关闭,导致气路出气口关闭,给气缸1增加压力,气缸1缓行,直至下方液控阀打开。
通过两个单向阀就可以实现负载的动态平衡分配,这里《双气缸自同步气控系统》有具体的推导过程,是不是很简单呢?(并不)
三.双液压同步驱动:由于液体的不可压缩性(温度影响除外),一般不用采用上面气动同步控制的接线方式,而是采用外部增加反馈信号的方式,实时控制流量的大小。如下图:
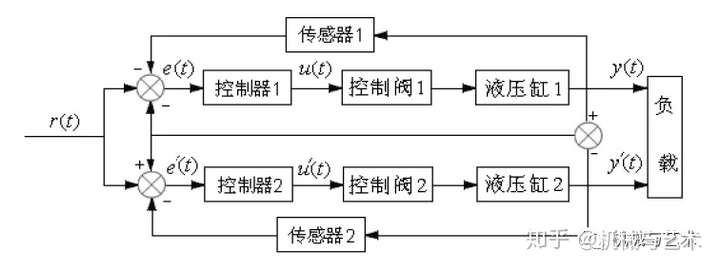
图10 | 采用交叉耦合方式的双杠同步控制系统方框图
有一些土豪朋友直接使用了伺服阀也是可以实现类似于电机的同步控制,通过对液体流量的实时监控,形成闭环控制。
有钱就是任性~
一种履带式液压驱动爬管装置,通过三个独立的液压缸进行移动,如图11
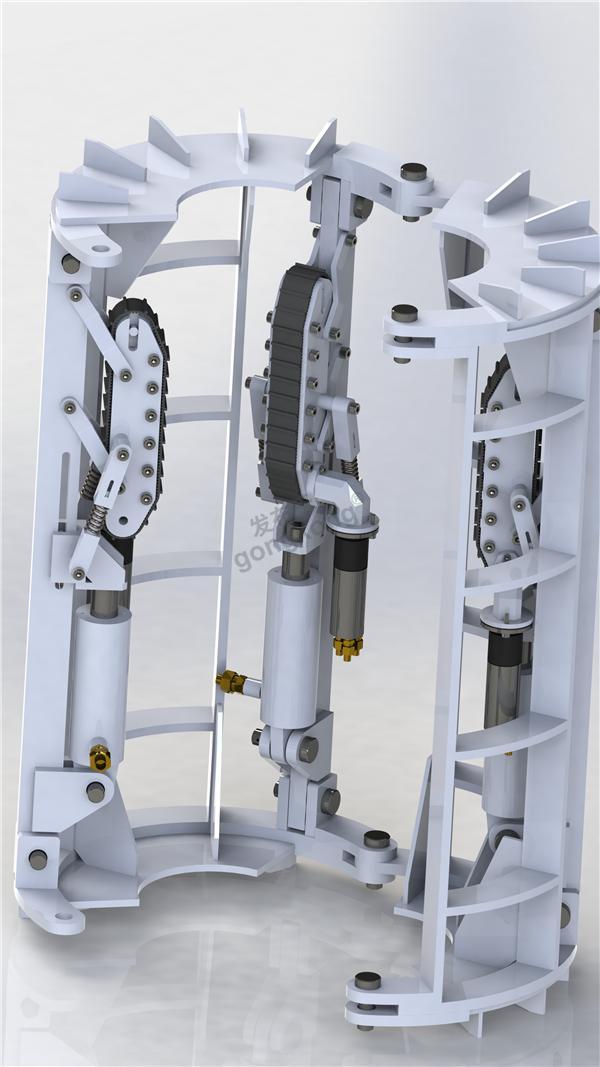
图11 | 一种履带式液压驱动爬管装置
—End—
参考文献:[1] 龙成忠.变频控制技术在双电机同步驱动同一负载中的应用[J].电气技术与自动化.No.9, 2008: 146~148.
[2] 王亚军.双电机驱动升降机构运动实时同步控制技术[J].控制与检测.2009.09: 60~63.
[3] 易静姝.双电机驱动同步控制系统的研究进展与关键技术[J].应用能源技术.2019.01.009: 32~34.
[4] 陈庆伟.双电机同步联动控制系统[J].南京理工大学学报.Vol .29 Oct .2005 : 103~106.
[5] 丁意.双缸同步控制系统的研究[J].流体传动与控制.2007 年3 月 : 24~26.
[6] 钱海涛.双缸同步液压系统设计[J].中国机械.
[7] 韩兵奇.双气缸自同步气控系统[J].液压气动与密封.2015年第06期 : 66~67.
[8] 宋云艳.双液压缸同步精确控制技术研究[J].制造业自动化.2014.07下 : 19~22.
关注公众号“机械与艺术”,回复 “20200502” 获取参考文献和三维模型下载地址





楼主最近还看过
- 讨论:大家都用什么软件画电气...
 [2678]
[2678] - 西门子S7-200 PID控制程序[773]
- 关于停止按钮[3102]
- 浅谈数控机床改造[384]
- 各位,您们好,有谁熟悉三维PR...[357]
- PLC控制喷嘴流量的方式[362]
- 电气图纸制图规范及电气图纸...[4643]
- S7-200与若托克仪表通讯问题...[359]
- 西门子S7-200 PID控制从入门...[369]
- 美国AB公司PLC折弯机程序.有...[785]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
