【ABB】ABB机器人运动速度设置方式 点击:1986 | 回复:4

发表于:2019-11-12 17:06:22
楼主
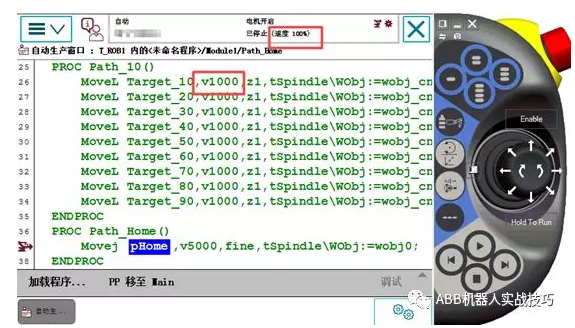
ABB机器人实际实际运行时,当前速度为运动指令内的speeddata(如上图的v1000)乘以当前程序速度百分比(如上图的100%)
2. 若运动指令中,使用\v:=100,则该语句使用100mm/s的速度代替原有v1000运行,如下图
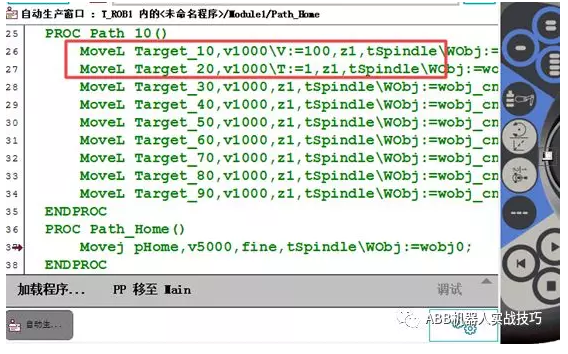
3. 若运动指令中,使用\T:=1,则完成该运动语句为1s,代替原有v1000速度
4. ABB机器人还提供以下设置速度指令

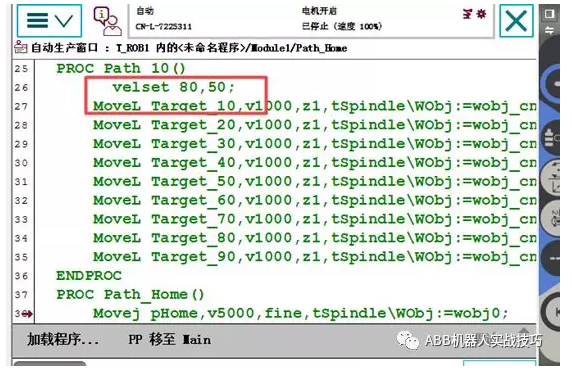
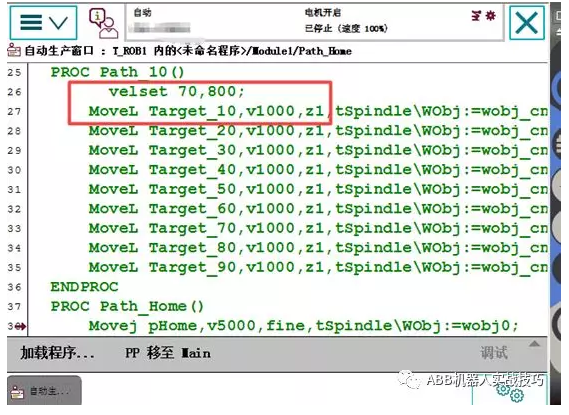
5. 可以使用速度设置指令Velset80,50指令来批量设置速度。其中80表示后续速度乘以80%,但运动语句的绝对速度不能超过50mm/s。下图机器人将以50mm/s速度运行
下图机器人将以700mm/s速度运行
6. SpeedRefresh 80 表示之后运动语句的机器人会以80%速度运行
7. 可以在程序一开始插入如下指令限制单轴速度
SpeedLimAxis ROB_1,1,20;
表示1轴最大速度为20°/s。
当关联了系统输入LimitSpeed时,对应信号为1,则机器人1轴速度被限制为20;信号为0,机器人速度恢复。
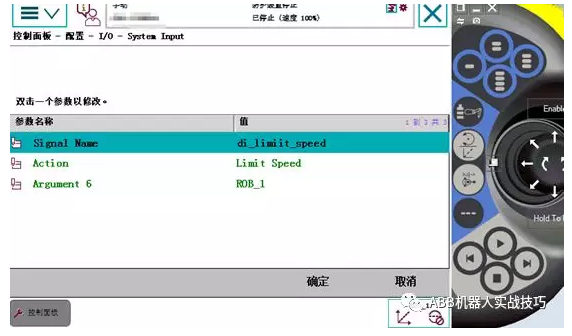
8. 进入控制面板-系统输入,关联Limit Speed功能,如下图。
9 也可插入线性速度限制指令SpeedLimCheckPoint 200; 则在系统输入Limit speed为1时,机器人速度被限制为200,系统输入Limit Speed为0时,速度恢复。
该指令对下图的C-F共4个位置进行速度限制







热门招聘
相关主题
- 如何调整伺服参数
 [797]
[797] - Delta2机器人——施耐德ELAU包...[1789]
- 机器人制作天空宝典[2249]
- 机器人关机后home点信号丢失[2624]
- 机器人的操作<柯马> ...[1106]
- 用什么东西做机器人示教盒比...[911]
- #技术发展#+现在电气自动化,...[1799]
- 请求朋友们首钢莫托曼机器人...[965]
- 第一讲 第四节 工业机器人坐...[30477]
- 研究“机器人视觉”能做什么样...[1260]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
