台达10pm运动控制器项目进行中 点击:5629 | 回复:62

发表于:2019-06-16 23:02:37
楼主
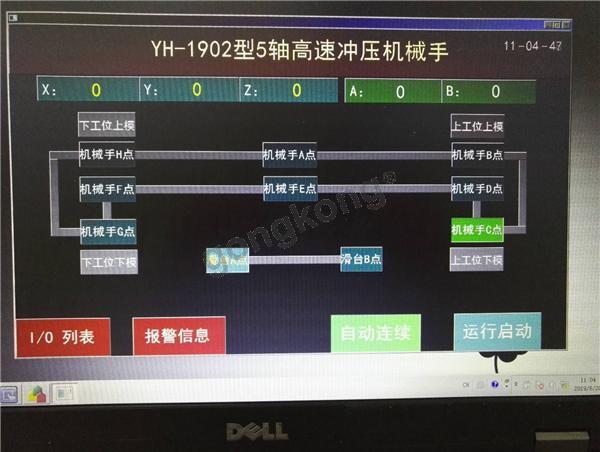
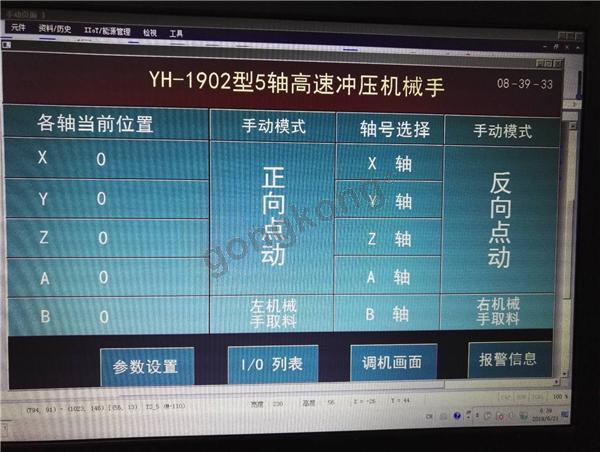
最近有个项目,目前是5轴伺服(后期可能会有第六轴),各轴无联动,但是为了效率,肯定有同动的。需要支持手轮调机操作。
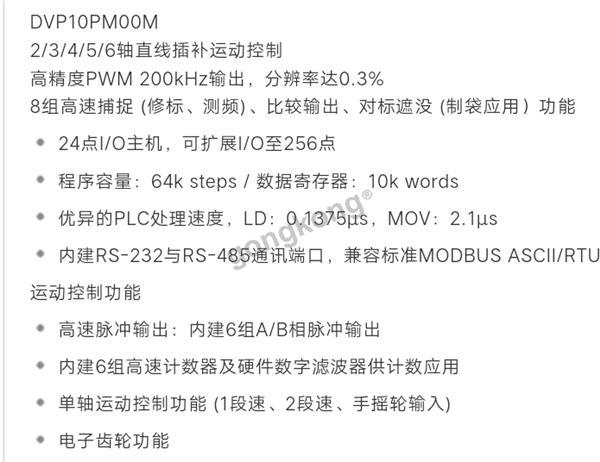
基于这些要求,选用了台达的10pm运动控制器,增加了一个32点混合io模块,增加了一个32点输入模块。伺服选用台达的B2型伺服。
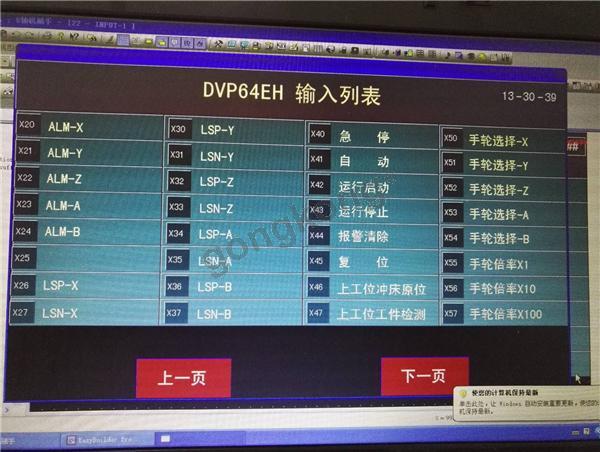
目前项目进度,电控箱安装完成,伺服参数调试设置完成,手轮可能因为电压搞错了烧坏了,新买的手轮还没收到,目前通过屏可以手动操作各轴JOG运动。期间发现了几个问题,手册上说主程序内不能写运动控制指令,事实是我在主程序调用了运动控制的功能块,运行正常,我也在子程序里试了运行各轴手动,都正常,现在就是发现调用第二个子程序时,第一个子程序貌似还在运行,或者说第一个子程序的结果还保持在,第二个子程序无法执行,而这个时候即便是再执行第一个子程序,也是无法执行的。手册上关于这一块说明太少了,也没有详细点的案例。再就是10pm手册上居然说10pm是不支持运动子程序OX 的。真是把我搞糊涂了,有没有大神刚好用过10PM的,给小弟指点一二,不胜感激!











发表于:2019-06-27 12:20:07
17楼
回复内容:
对: 嘟嘟 回复内容:楼主趁着这段时间可以休息休息了,后续持续关注... 内容的回复!
-------------------------
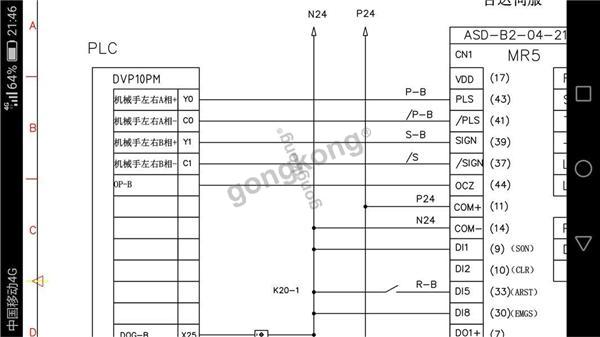
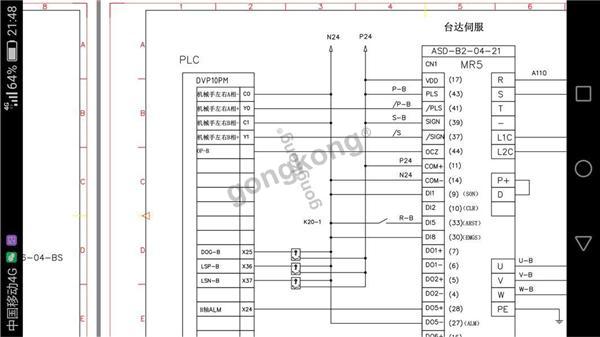
搞工控的很少有时间休息的哦,项目不结束,也休息不踏实。谁知道调试过程中会出现什么鬼问题。前几次调试就出现了一些问题,有伺服接线的问题,10pm给的接线是错的,或者说有对有错,刚好我们按错的接了,再就是台达伺服必须设电子齿轮比,我之前用三菱伺服一般只设每转脉冲数,几乎不用电子齿轮比,谁知道台达必须用电子齿轮比,不然,速度很慢很慢。。。。搞工控就是不断的遇到问题,不断的解决问题。嘿嘿。。。
热门招聘
相关主题
- 台达机器视觉系统DMV系列介绍...
 [89]
[89] - 台达数控主轴[286]
- DOP与DVP通讯[350]
- 结构设计准则[170]
- 由台达引起,想要说一些话……...[384]
- 台达光源介绍-环形光源[160]
- 台达温控模块DTM系列入门教程...[751]
- 台达温控仪DTC1000[851]
- 台达ISPsofot[344]
- 跪求实现ANB串连回路方块的方...[124]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
