欧姆龙NX1P2相关问题咨询 点击:306 | 回复:0

发表于:2019-02-01 20:22:33
楼主
欧姆龙官方资料,我打算用ethercat通信控制多台伺服驱动器(我还没有用过ethercat),因此有几个疑问向前辈们咨询:
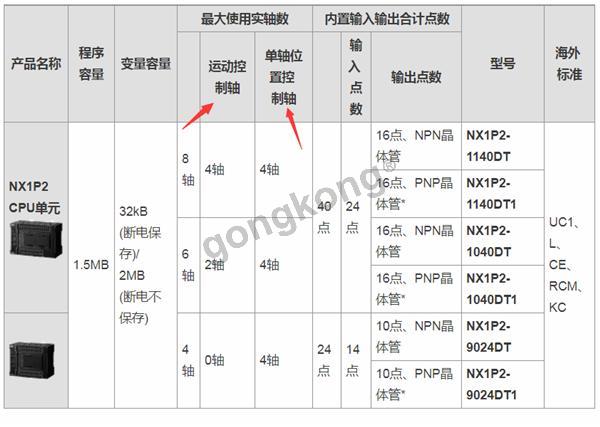
(1)我问了他们客服,告诉说如果我要实现扭矩、速度控制等必须要选择运动控制轴。
我的想法是既然我通过Ethercat实现控制器与伺服驱动器的通讯,那还跟它限制什么运动、位置控制轴有什么关系呢?不都是用通讯设置参数就能够实现运动控制了吗?
(2)关于最大实轴数,客服说最多只能控制4轴,不管你用什么方式控制。
我的想法是既然我选择了ethercat通讯,只要ethercat总线支持挂多少驱动器,那么就能实现多少轴控制,和资料上提到的最大实用实轴数又有何关系呢?
以上两点是我的疑惑,因为我从来没有用过ethercat通信,故向前辈们咨询,谢谢解答!





热门招聘
相关主题
- 旋切、飞剪、追剪、飞锯、停剪、横...
 [10680]
[10680] - 请教:伺服电机在速度控制模式...[10510]
- 主轴电机和进给轴电机有什么...[9261]
- 高速收放卷控制[11795]
- 解释位置环的作用?[23659]
- 怎样选择运动控制卡啊???[10643]
- 求助:松下伺服电机的报警代码...[30094]
- 圆盘24等分高速精确控制问题[9613]
- 做运动控制卡,控制器之类的产...[5449]
- 松下伺服中有关“机械刚性”的...[7848]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
