全闭环位置控制参数调节问题 点击:512 | 回复:8






楼主最近还看过
发表于:2018-11-29 09:56:46
2楼
说一点经验。
“在伺服驱动中调节好了速度环的PI参数,曲线也比较理想,”这个,本身有点探讨的空间。
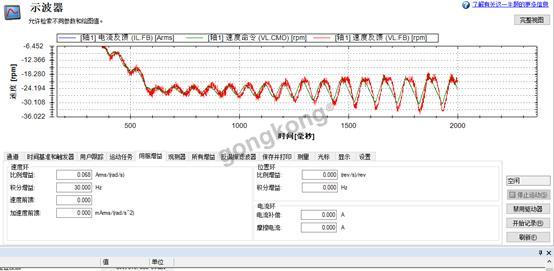
第一,光栅尺没有接到驱动器上,理想的速度曲线时来自编码器的,控制器上的调整是基于光栅尺的,由于传动环节可能存在的机械问题,两者之间不一致时正常的。在比较严重的情况下,可能内环(编码器)速度以特定方式波动时,外环(光栅尺)速度才是稳定的。
第二,速度环曲线理想是一个什么概念(因为没有看到曲线,不知道是不是存在问题,说的东西也许是您已经知道的)。速度曲线好坏,有两个指标,一个是速度稳定状态下的波动幅度,一个是速度变化时的跟踪(响应)速度。两者都很重要,但是两者并不等价。不同的应用方式中对两者的侧重不同,例如,当速度环是作为位置环的内环使用的时候,后者比前者更重要。因为由位置环而来的速度指令,必然是一个频繁变化的不稳定的指令。如果您之前看到的理想曲线是更中侧重平稳性的,那么加上位置环滞后效果不好也很正常。(“之后”两个字打错了,不过看看似乎也有道理,就不改了)。举两个来自洋鬼子的产品中的例子:一个是以色列的驱动器,在其调试软件中,速度环的自整定功能分成两个选项,一个是单纯的速度环整定,一个是有位置环的速度环整定。另一个是个德国的位置闭环的控制器,它手册的调试步骤中明确要求将驱动器上速度环积分关掉,只保留比例增益。
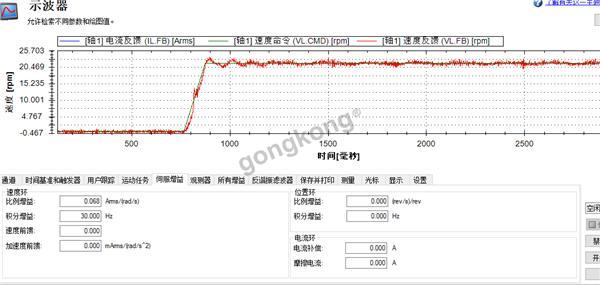
“在控制器上位置环调节了比例和速度前馈参数,定位精度还不错。”
对于控制器来说,定位精度和速度平稳都是调整好坏的指标,但是两者同样是不等价的。

热门招聘
相关主题
- 三菱PLC控制伺服的暂停问题
 [6337]
[6337] - 关于同步伺服电机堵转的疑问[7162]
- 提高86步进电机转速[8209]
- 变频器驱动伺服电机[8008]
- 松下伺服中有关“机械刚性”的...[7848]
- 谁有禾川伺服控制器HCFA-SV-...[8097]
- 给大家介绍一下trio运动控制...[22906]
- 旋切、飞剪、追剪、飞锯、停剪、横...[10680]
- PMSM电机电流波形如下,这么会...[6324]
- pc直接控制伺服电机[6153]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
