从自动化理论看工业互联网——闭环控制 点击:585 | 回复:2

本文是从自动化理论看工业互联网系列文章的第二篇,介绍自动化中最重要的闭环控制,第一篇文章参见从自动化理论看工业互联网——开篇。
闭环控制原理非常简单
提起闭环控制会有人感觉陌生,但闭环控制的原理在我们日常生活中非常普遍。比如我们要将一杯水通过水龙头注满,这样的日常非常简单的事情,很多人都认为很简单,但这是一个闭环的过程,假想如果是一个盲人注水,会怎样?他如何判断水是否注满?通常盲人注水是无法达到想要的水位的。
(本图源自第五项修炼书)
其实人来在为杯子加水的过程是:我们注视着水杯的水位,监测移动的水位与我们想要的水位之间的距离,当杯中的水接近想要的水位的时候,我们调整水龙头使水流慢下来,直到加好水而水龙头关进。如下示意图:
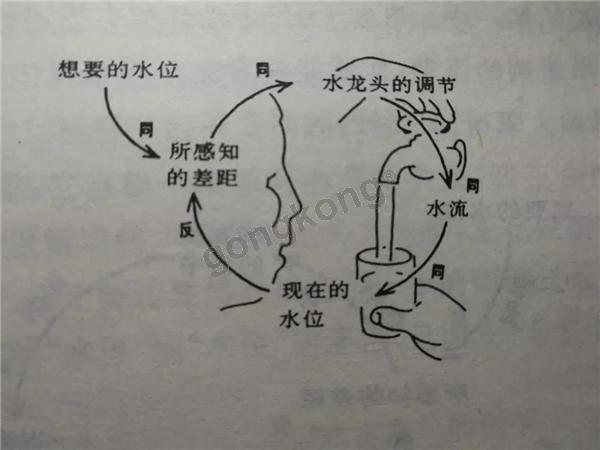
(本图源自第五项修炼书)
盲人注水的过程却少了所感知的差距这个环节(是开环),因而无法将水注到期望的水位。
其实我们注水的过程就是一个涉及五项变数的闭环系统:目标水位,杯子现在的水位,两者的差距,水龙头的位置与水的流量。
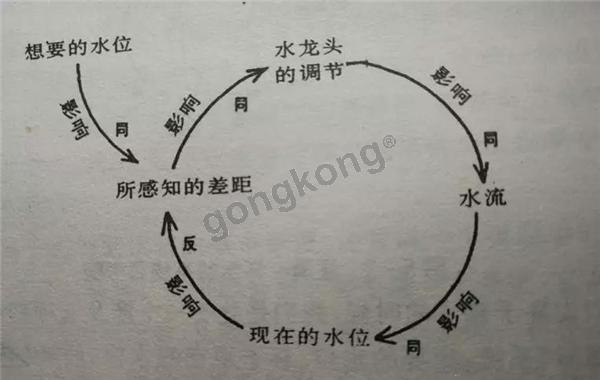
本图源自第五项修炼书)
这就是一个最简单的闭环控制的应用,而对应的盲人注水,则因为缺少了感知的差距的环节,而只是开环,因而无法精准控制水位。
瓦特将蒸汽机由开环控制升级为闭环控制
很多人都认为蒸汽机是瓦特发明的,但事实上,蒸汽机很早就有,但因为早期的蒸汽机无法控制,无法大规模使用。1788年,瓦特发明了飞球调节器,推动了蒸汽机在工业的广泛应用。传统的蒸汽机是开环的不能被很好的利用,瓦特发明的调解器形成闭环,开启了工业革命。
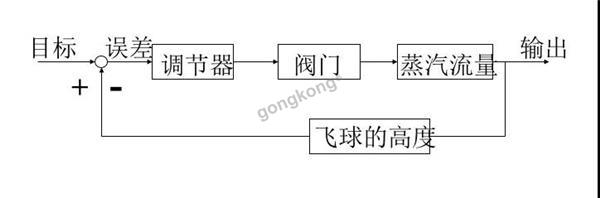
下图就是瓦特发明的离心式飞球调节器,这个调解器用于控制蒸汽机的阀门,构成了蒸汽机的闭环自动调节系统。
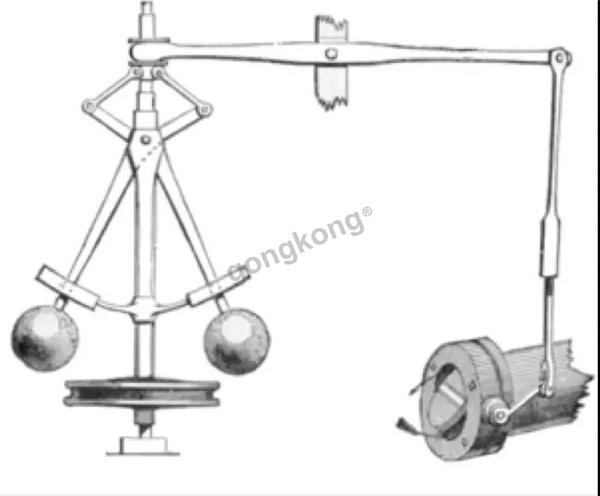
这个调节阀的原理是:蒸汽出口阀门由飞球调节器控制,当出口蒸汽量大的时候,推动设备旋转速度增加,转速增加离心力增加,让小球飞的高度变高,通过传统机构会减小阀门,减少出气量;蒸汽量减少后,旋转速度降低,小球降落,通过传动机构,加大阀门增加出气量。从而将出气量维持在一个稳定的水平。
瓦特的离心式飞球调节器,会遇到一种现象:当蒸汽流量偏离设定目标非常大,比如蒸汽流量远远大于目标流量,出气量导致转速增加很大,从而让飞球转速快速增加,导致飞球快速升高,进而让阀门快速关闭;导致蒸汽的流量迅速下降,飞球迅速下降,又让阀门快速打开。这样快速的阀门打开、关闭,会形成蒸汽流量的变化也快速振动,不能让蒸汽量维持在稳定的设定目标,而是以设定目标为中心,上下快速振动,这样的系统就不稳定。
所以自动化理论主要是研究如何设定系统,保持一个稳定的状态。
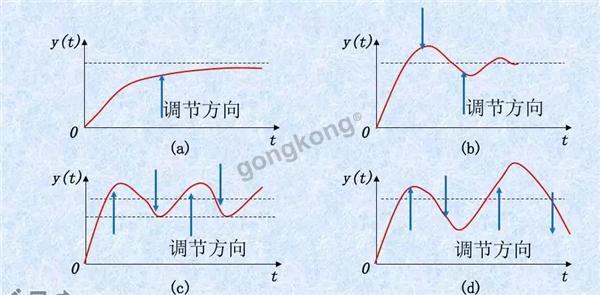
如图所示,控制理论是希望让设定的系统的输出和目标之间按a,b两张图的轨迹发展,而避免出现c、d两张图的情况。

a,b两张图的系统是收敛的,而c,d两张图是发散的。
为了避免C、D两种情况发生,在输出量与设定目标比较接近的时候,需要调节让输出量的变化速率降低,慢慢接近设定目标值,这就需要增加阻尼,这个效果类似于积分;在输出量与设定目标偏差较大的时候,需要调节输出量,让输出量快速接近设定目标值,这个效果类似于微分。
所以最流行的控制系统,包括按比例的反馈调节控制P,降低偏差小的调节速率的微分控制I,和增加偏差大的调节速率的微分控制D。这就是历史最久、应用最广、适应性最强的控制方式PID(Proportional-Integral-Differental)控制,PID控制占控制算法的85%-90%。
正反馈与负反馈
系统设计中,当偏差值偏离目标的时候,会有一个调节量,如果调节量的值增加偏离目标量,就会形成振荡,而调节量的增值是降低偏离目标量,就会收敛。
如图a,b,当输出值偏离目标值的时候,调节方向是指向目标方向的。因而调节会让输出逐步收敛。
而如图c,d,输出值偏离目标值的时候,调节方向是背离目标方向的,因而调节会让输出发散。
都是时间滞后惹的祸
对于控制来说,希望让输出逐步收敛。为什么会有正反馈现象?
完全理想状况下,调节机构是按理想状态没有时间差来设计的。但是调节机构需要有检测、控制环节,这些环节都会有一个时间滞后,当时间滞后的调节指向目标值的时候,因为输出值变化太快,输出值已经从一个方向的偏差变成了另外一个方向的偏差,这个时候偏差方向与调节方向一致,就形成了正反馈。
例如一个淋浴设备,是老旧的设备,从转动水龙头到水温的改变,有一个意见的滞后。这个调节环路如图示。
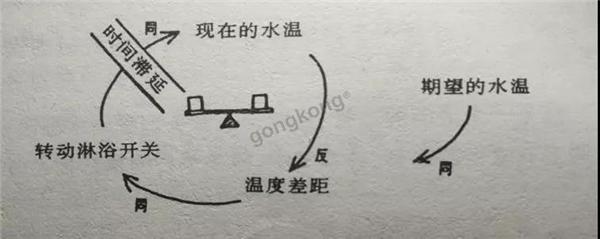
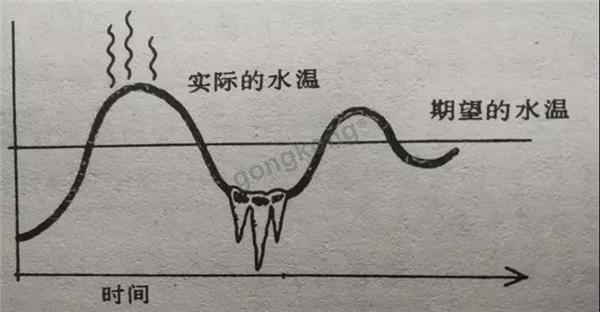
当你循一个带有时间滞延的箭头看下去的时候,在你增强热度十秒滞后,水依然是冷的。你没有得到对自己行动的反应,因此你认为自己的动作不起作用,接下来反应是增强热度。当热水终于到达,水龙头流出的是高温的水,你挑开并把它转回去,在另一次时间滞延滞后,水又是冷的。通过条件环路,不断地调试。
当行为越积极,越是猛烈地转水龙头,达到所需要的温度的时间越久。
而只有慢慢调节水龙头,不断尝试,才能获得期望的水温。
自动控制原理主要描述的是闭环、负反馈的系统。保证系统能够闭环。
为了更好的阐述自动控制原理,我引用了很多《第五项修炼》的内容。
下一篇文章,将介绍自动控制原理的最通用的应用,第五项修炼的动态系统。
来源:微信号xuyongshuo-work
作者:许永硕
该作品已获作者授权,未经许可,禁止任何个人及第三方转载。





楼主最近还看过


- 杭州市智慧交通的建设有何意...
 [1926]
[1926] - 智能制造新理念----中国制造...[871]
- IMS-WMS系统流程,你知道多少...[1340]
- 许永硕:物联网需要运营平台[783]
- 精密制造技术为3C模具市场保...[635]
- RPA是企业实现人工智能的最便...[633]
- 运动控制卡编程[1134]
- 智能知识——BOM的数据结构及内...[888]
- 5G对社会的影响[652]
- 時尚趣闻-----全球首款全智能...[6548]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
