伺服电机的位置控制,转矩控制,速度控制是什么样的一个模式 点击:2494 | 回复:25






嗯,但是我想知道,他的具体工作时是怎么样的一个时序



发表于:2012-12-21 22:13:35
5楼
回复内容:
对:ShowMotion关于伺服系统根据控制的目标对象位置、速度、力矩,就产生了基本的三环控制,位置环、速度环、力矩环。不管什么模式力矩环是一定存在的,它是底层基石,当控制对象是力矩时,它可以独立工作,但是要限制速度。速度模式的控制对象是速度,它调节反馈速度与给定速度一致,它内部一定包含力矩环。位置模式控制的对象是位置,它调节反馈的位置与给定的位置一样,位置环可以包含速度环,也可以直接包含力矩环。 内容的回复:
嗯,但是我想知道,他的具体工作时是怎么样的一个时序
例如位置控制模式,他工作的时候是不是PLC发脉冲的时候开始转动,然后plc一直发脉冲,伺服就一直走,PLC脉冲停止的时候伺服电机就停止转动?还是怎么样工作呢?可能这问题很基础,还望可以得到普教,谢谢
发表于:2012-12-22 22:29:44
6楼

发表于:2012-12-24 12:05:25
19楼
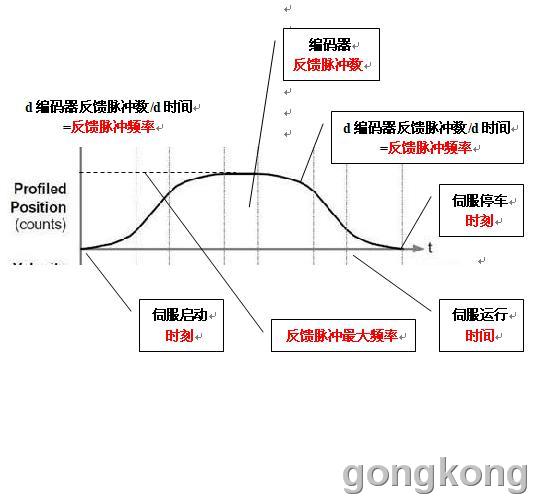
17、仔细观察这条曲线,伺服电机的加速、减速,就是靠驱动器变频、变压的速度环完成的,所需要的动力转矩是由电流环完成的,这就是ShowMotion 说的,“位置环可以包含速度环,也可以直接包含力矩环”!
热门招聘
相关主题
- 伺服一旦使能,外部供电的漏电...
 [16894]
[16894] - 关于松下A4系列伺服电机抖动...[6093]
- 伺服学习资料[6431]
- 伺服电机的输出线可以用屏蔽...[11209]
- 如何避免松下伺服因干扰而自...[8758]
- 电机转速和输入脉冲频率的关...[7117]
- 增量式编码器A、B、Z输出和A,A...[5586]
- 正余弦邊(1Vpp)碼器與方波(T...[8113]
- 请教关于雕刻机刻圆的问题[7093]
- 原点回归指令[7029]

官方公众号

智造工程师
-

 客服
客服

-

 小程序
小程序

-

 公众号
公众号











 工控网智造工程师好文精选
工控网智造工程师好文精选
